The measure of a man: Evaluating the role of astronauts in the Manned Orbiting Laboratory program (part 2)by Dwayne A. Day
|

| One of the primary recommendations of the May 1966 report was that the program office should undertake formal studies to quantify the value of man in the MOL program and stop making vague guesses: prove it, rather than assert it. |
Throughout 1966 and 1967 the MOL spacecraft design began to take shape. Engineers at Douglas, which was designing the spacecraft; Eastman Kodak, which was designing the DORIAN optical system; and numerous other contractors responsible for various subsystems were refining their designs and determining how astronauts would operate the spacecraft. McDonnell was working on the Gemini-B, a modified version of NASA’s Gemini spacecraft, and they merged with Douglas in April 1967. The companies were building increasingly higher-fidelity mockups of the major systems to work out how the astronauts would operate the spacecraft and its many subsystems.
One of the primary recommendations of the May 1966 report was that the program office should undertake formal studies to quantify the value of man in the MOL program and stop making vague guesses: prove it, rather than assert it. By summer 1967, numerous studies were underway or completed and the program office produced another, significantly updated report on the value of astronauts for the MOL reconnaissance mission. The report, “Contributions of Man in the MOL Program,” provides substantial insight into exactly what the Air Force, and the secretive National Reconnaissance Office, expected military astronauts to do aboard the orbiting space station.
After all the simulation and modeling and hardware development, the role of the astronauts on MOL was much better defined. Their tasks fell into two main categories: optimizing and maintaining the camera system and operating it to maximize the intelligence that could be collected. One of the most important responsibilities for the astronauts was focusing the powerful DORIAN camera that was at the heart of the spacecraft and its mission.
 Despite the use of a modified NASA Gemini spacecraft, much of MOL was cutting edge, and contractors used computers for engineering design and simulation. (credit: NRO) 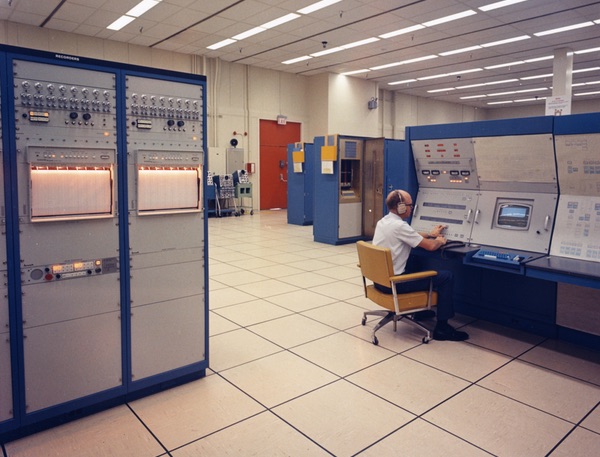 |
Fine adjustment
As both the Manned Orbiting Laboratory spacecraft and its very high resolution DORIAN camera system matured, designers and operators began to realize what it would require to operate such a large optical system in orbit. Today, both the maximum resolution and the focal length of the camera remain classified, but MOL was a very high resolution system intended to be at least two to three times more powerful than the best system then in operation, the GAMBIT-3. Achieving that high resolution resulted in the camera having a small field of view on the ground, and a very fine focus that might go out of whack due to environmental factors. Designers determined that they could not automatically focus the camera and that, in order to obtain the best photographs, the astronauts would have to do it, possibly multiple times during the 30-day mission.
| The humans were increasingly in service to the machine. |
To determine and/or verify the plane of best focus for the camera system, the astronauts would have to undertake several steps after reaching orbit and setting up the optics. First, they would command the camera to expose a number of frames on the film, where each frame represented one of a series of sequential positions of the platen, the surface that the film rested against. They would probably do this while flying over a resolution test target located at a military base in the United States. Resolution test targets consisted of various white, black, and sometimes gray-painted shapes located in patterns on the ground. Because the size of the shapes was known, photographs of them would reveal the camera’s resolution. The astronauts would remove the exposed film from the camera, place it in an onboard processor, and operate the processor. They would then have to remove the film and visually inspect each of the exposed and processed frames, judging which frame was the highest quality. The platen position that produced the highest quality image represented the plane of best focus. Thereafter, the astronauts could monitor focus system output meters and ground-commanded focus adjustments, and could override focus control commands in accordance with their findings. The astronauts might repeat the testing process throughout the 30-day mission to confirm that the optical system was staying within its parameters.
According to a top-secret memo written in summer 1967, this method of exposing, developing, and evaluating the film was the best solution. The designers had looked into equipping the system with a glass onto which the main optics would project an image for the astronauts, but they determined that an astronaut would be unable “to evaluate, retain, and compare the focus data from a ground glass.” They needed to look at exposed and developed film.
By October 20, 1967, Major General James T. Stewart, Vice Director of the MOL Program, wrote the cover letter to a report on “Contributions of Man in the MOL Program.” Stewart noted that the program office’s goal was to proceed toward “a reliable capability in [the unmanned system] as soon as practicable.” Stewart’s letter implied that whereas in 1965 the goal of the MOL program was to develop a manned reconnaissance satellite, and in 1966 the unmanned system was being pursued as a sort of backup to the manned system, by late 1967 the goal was for the astronauts to perfect the system and then future MOL spacecraft would be the unmanned configuration. The humans were increasingly in service to the machine.
Although Stewart’s cover letter implied this, he later clarified that “the manned system is being developed because this gives a high assurance of meeting the objective at the earliest possible time. The unmanned system is being developed to insure a very high resolution photographic capability should international objections or foreign threats preclude manned operations, or should man prove unable to function effectively for prolonged periods on orbit (this latter concern is diminishing as manned space flight experience accumulates).”
Other declassified documents indicate that the MOL program office was concerned about the development of Soviet anti-satellite weapons during the latter 1960s. Nobody had forgotten the May 1960 U-2 incident when Gary Powers was shot down over the Soviet Union and forced to undergo a show trial. This was something that National Reconnaissance Office officials were conscious of because of all the robotic spacecraft that they regularly operated. But after seven years of reconnaissance satellite operations, there was no evidence that the Soviet Union would attack American reconnaissance satellites in peacetime, and there is no indication that NRO or MOL officials believed that a manned spacecraft would be attacked in peacetime either.
Stewart’s lack of clarity in his cover letter for the report is in some ways typical for the MOL program, which never received, or satisfied, a clear and unambiguous set of requirements from the intelligence community. MOL had an intelligence role, but a niche one. It was also being driven in part by the Air Force’s desire to put astronauts into space. NASA astronauts were getting a lot of glory, and the Air Force wanted some of its own.
The 87-page report, while not delving into the actual design of the DORIAN optical system, noted that it was complex and included many different functions. “These functions involve automatic devices many of which either have never before been used on orbit or represent large extrapolations in precision, accuracy, or other capabilities,” the report stated. It also explained that the manned system would be capable of “hands-off” photography using automatic devices.
The report further stated that the camera would be so big that it could not be a completely rigid structure. The optical elements would be clamped down during launch and ascent to orbit in order to protect them, then released after achieving orbit. They would be automatically aligned and realigned as necessary during the course of the mission. The astronauts could manually set the alignment within the desired limits by observing the light path used to align the optics.
The report noted that “estimates of reliability for the mature manned and unmanned MOL systems are quite high due to the basic design philosophy of incorporating proven hardware and/or redundancies where practical in all sub-systems and components.” For the laboratory module, a relatively mature system with 95 percent or better probability of success for a 30-day period was expected virtually from the outset, based upon the fact that the laboratory subsystems would be derived from current hardware on Gemini and Apollo. These systems would also be extensively tested on the ground.
 Hardware production was underway at the time that MOL was canceled in summer 1969, although no flight hardware was completed. (credit: NRO) |
When things went wrong
The engineers had made numerous hardware design decisions based upon their assumptions of the utility of astronauts onboard the spacecraft. For instance, the only system that would be designed for on-orbit maintenance by the astronauts was the life support system. None of the other systems would be regularly serviceable. But the astronauts would be able to troubleshoot and to perform basic adjustments to systems.
| Stewart’s lack of clarity in his cover letter for the report is in some ways typical for the MOL program, which never received, or satisfied, a clear and unambiguous set of requirements from the intelligence community. |
The space laboratory would be equipped with a malfunction alarm system that would monitor approximately 100 laboratory plus 100 mission payload segment parameters, and would have audio and visual cues to out-of-tolerance conditions. The alarm system would immediately start automatic recording of telemetry data.
The report stated that the low early maturity of the camera system and the relatively high initial maturity of the laboratory and Gemini, plus the ability of the crew to diagnose and correct problems on orbit, indicated that it was both practical and desirable to schedule the manned flights first. The astronauts could operate the system in a degraded mode by circumventing many types of failures. The crew could perform health checks on various subsystems, particularly the camera, but also the laboratory. During failures or out-of-spec performance, the astronauts could perform diagnostic functions to verify and supplement telemetry provided to the ground, working with ground controllers to figure out the problems and solve them.
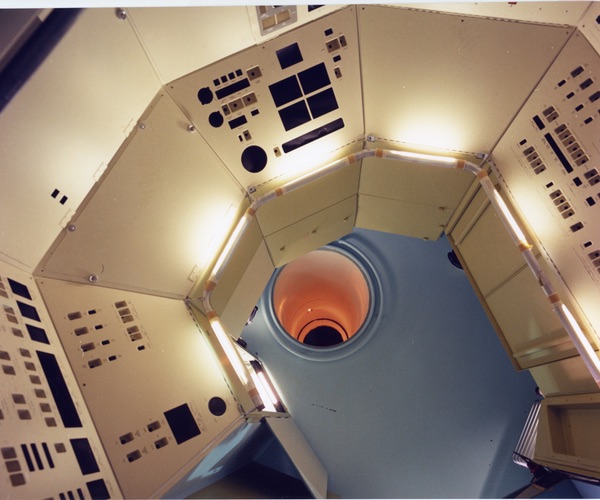 Contractors built numerous mockups of both the exterior and interior of MOL. These are early medium-fidelity mockups. (credit: NRO) 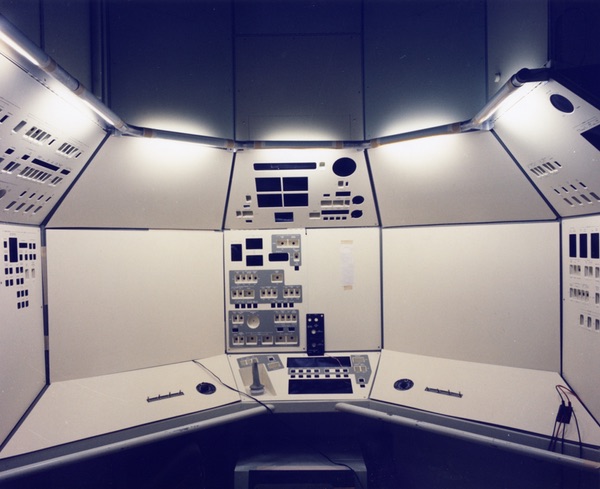 |
Adjusting DORIAN
The report explained that the MOL optics system “is extremely sophisticated” in comparison to systems such as the GAMBIT-1 and GAMBIT-3. The GAMBIT-1 reconnaissance satellite, which also had the designation KH-7, entered service in 1963 and was finally retired in 1967. The GAMBIT-3, also known as the KH-8, entered service in 1966 and featured an upgraded camera system that increased resolution. DORIAN was far bigger and more complex, which increased the number of things that could go wrong with the system.
If something did go wrong with the DORIAN camera system, the crew would detect degraded performance on the first day of the mission, whereas in an unmanned system the problems would go undetected for almost ten days until the first reentry vehicle had been recovered and its film load processed. In addition, the crew would be able to diagnose problems with the camera quickly. For example, if photography got blurred because of the spacecraft attitude system firing, the crew would immediately detect this. There was an inhibit signal that was supposed to prevent the thruster jets from firing while the camera was taking photographs, but if it failed, the astronauts would manually inhibit the control jets during photography.
Image degradation could also be caused by “an early onset of thermal deformation of the tracking mirror” caused by heat getting into the camera system through its aperture door. To verify that, the astronauts would take pictures with varying door-open times to confirm the cause and establish a new maximum door-open time for use in subsequent target programming.
| One surprising omission from the October 1967 report is something that the May 1966 report authors claimed was the primary, but eroding, justification for having a crew aboard MOL: to precisely locate targets on the ground. |
The report explained how problems with the camera system could easily be traced to malfunctions in different subsystems if the astronauts were onboard the spacecraft while the problems occurred. For example, a blurry image would indicate a focus problem, possibly due to misalignment of the optics. But a smeared image would indicate a problem with the system for compensating for the motion of the image in the optics as the spacecraft moved over the Earth. Some of these problems could be immediately detected and corrected, whereas others would require the astronauts to perform a diagnosis and report their analysis to the ground for the engineers to figure out. The astronauts’ in-flight diagnoses “as supplements to ground analyses, are expected to materially assist in the rapid isolation of sources of problems and thus speed the maturing of the automatic devices necessary for the unmanned system,” the report’s authors claimed.
 Declassified artist impression of the manned version of the MOL. The Gemini-B spacecraft is at left and the pressurized laboratory module is at center. The large DORIAN optical system is at right. (credit: NRO) |
Peering through a soda straw
Although the astronauts would prove invaluable at both optimizing the camera system and identifying and fixing problems, the report claimed that their greatest value would be in operating the system to maximize the intelligence information that it collected. For this claim they relied heavily upon a series of studies and simulations that the program office had been conducting in the past year, some of them relatively recent.
One surprising omission from the October 1967 report is something that the May 1966 report authors claimed was the primary, but eroding, justification for having a crew aboard MOL: to precisely locate targets on the ground. The 1966 report claimed that targets were not geographically plotted to high precision and the MOL’s orbit would not be precisely known, and thus an automatic pointing system might miss the targets completely. An astronaut could center the targets and correct the biases in the pointing data. But by late 1967 the photo-reconnaissance community must have developed such high confidence in their ability to precisely point optics at targets on the ground that this issue was not even mentioned in the latter report. Instead, the astronauts’ two greatest contributions to intelligence collection would be locating targets of opportunity and avoiding weather.
Whereas in spring 1966 the designers still had not settled on what equipment would be used by the astronauts to control the camera system, they had made some major design decisions by fall 1967. Instead of using a black-and-white TV system for viewing the ground targets and operating the main camera, the designers had now incorporated a tracking and acquisition system that consisted of two separate optical periscopes that pointed out of the spacecraft, one for each astronaut. An astronaut could slave the main optics to the tracking and acquisition scopes, or could view the target directly through the main optics, thereby centering the camera field of view with a high degree of precision compared to an all-automatic system.
The main DORIAN camera had a field of view of a 9,000-foot (2,740-meter) diameter circle on the ground from 80 nautical miles (148 kilometers) altitude. This 9,000-foot diameter circle was not very big compared to the size of some of the targets the intelligence community was interested in, such as airfields, missile ranges, and shipyards, and objects would move in and out of the circle relatively quickly as the spacecraft traveled overhead. Decades later, it was common for intelligence analysts and military commanders to compare using high-resolution reconnaissance satellites to peering at the world through a soda straw. The MOL astronauts would do most of their searching for targets of opportunity using the tracking and acquisition telescopes—sort of like looking at the world through a paper towel tube in order to point the soda straw at the correct target. In the lower magnification setting, the tracking and acquisition scopes had a circular field of view on the ground of about 6.5 nautical miles (12 kilometers) in diameter with a resolution of about 30 feet (9.1 meters). In the upper magnification range, the scope field of view would be approximately 4,200 feet (1,280 meters), about half the MOL camera’s field of view, and the resolution would be about 3.5 feet (1.1 meters).
The goal for the astronauts was to point the center of the 9,000-foot circle at the target to take a photograph, because that provided the highest quality image. The optical resolution was degraded about 10 percent in the outer portion of the frame.
The report stated that analysis of GAMBIT-1 and GAMBIT-3 photography indicated “that often the targets of greatest intelligence value were not those which were the primary aiming points, but were a ‘bonus’ by virtue of the extent of the camera’s field of view.” These targets could often be transitory, such as a missile being loaded into a silo compared to a nearby but closed-up silo.
| The MOL astronauts would do most of their searching for targets of opportunity using the tracking and acquisition telescopes—sort of like looking at the world through a paper towel tube in order to point the soda straw at the correct target. |
GAMBIT satellites had been operating since 1963 and dozens of missions had flown by late 1967. GAMBIT photography indicated that 70 percent of the target categories had the potential of momentarily increased intelligence value, but these situations occurred only six percent of the time. These included missile test sites, airfields, naval bases, and radar and electronics research and development centers. An astronaut could spot the targets where something different and important was occurring and point the DORIAN camera at that target to take a picture. If an astronaut did not do this, the camera would possibly miss the activity entirely.
The GAMBIT satellites operated in a different manner than the DORIAN. They worked by pulling a wide strip of film along a slit at the focal point of the camera. The resulting images were longer than they were wide. The GAMBIT-1 had a 10-nautical-mile (18.5-kilometer) swath width, whereas the GAMBIT-3’s more powerful camera was half that. Because the satellites were in polar orbits, the film width was primarily east-west and the length was north-south. If there were a bunch of targets of interest along a north-south line within the swath width, the film could capture them, but if they were east-west, some might be outside of the imaging swath.
According to the report, experience with GAMBIT indicated that in many instances “little information was derived from the photographs of the pre-selected target or targets which were the primary aiming point for the center of the frame, whereas other targets which appeared within the frame only by virtue of its length and width yielded considerably more intelligence information.” MOL was different and the report emphasized that “the limited field of view of the MOL camera system denies such ‘bonus’ targets; this fact plus the transitory nature of the objects makes it particularly critical that the MOL camera be directed to the right target at the right time.”
To try and demonstrate the differences, the program office had analyzed a target rich area: the vast rocket and missile testing facility in Kazakhstan called Baikonur, which the US intelligence community in the 1960s referred to as “Tyura-Tam.” Analysts counted more than 60 MOL-size targets at the complex, only two or three of which could be photographed by the MOL on a single pass. They then analyzed existing GAMBIT photographs of the facility and noted that “of 159 launch pad photographs analyzed, only 9 percent revealed missiles on the pad; 77 silo photographs yielded 21 percent with doors open.” Tyura-Tam was unique because it was a testing facility and missiles would be out in the open more often, as opposed to an operational missile field where most of the time the missile silo doors would be closed, concealing the missiles. The report noted that the results were “much higher incidences than would normally occur with operational systems, which further emphasizes the importance of obtaining technical intelligence data in the early development phase” of a missile or rocket.
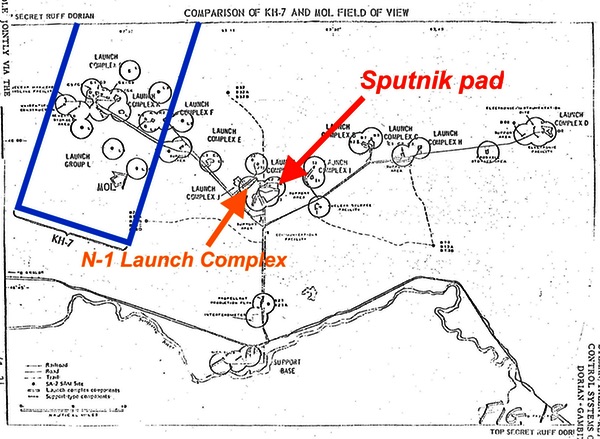 Declassified map of the Baikonur missile and rocket test facility, which the U.S. intelligence community referred to as Tyuratam. Each circle depicts the field of view of the powerful DORIAN optical system. The blue rectangle depicts the imaging swath of a KH-7 GAMBIT reconnaissance satellite. Although DORIAN would have taken photographs with far higher ground resolution, MOL only could have photographed 2-3 of these targets during each overflight. MOL officials believed that this required having astronauts select the best targets, such as launch pads with rockets on them. (credit: NRO) |
A map showed a single KH-7 GAMBIT-1 pass over Tyura-Tam photographing thirteen and a half MOL-sized targets. In contrast, MOL could only photograph two or three targets during its pass over the missile complex, thus illustrating just how important it was to have an astronaut point the camera at the best targets. MOL’s imagery would be much higher resolution than GAMBIT-1, which was generally obtaining about two-foot (0.6-meter) ground resolution at the time. MOL’s designers hoped that DORIAN’s higher resolution would reveal substantial technical intelligence about Soviet weapons systems such as ICBMs, rockets, and bombers.
During an imaging pass over a target area, there could be up to six alternate targets besides a main target whose coordinates were stored in the MOL’s state-of-the-art computer. The astronaut would look at each target and decide if it was cloud-covered, clear, clear and inactive, clear and active, and so on. “The crew determinations are provided to the on-board computer which, based on pre-programmed logic, selects the appropriate target to be photographed. If the astronauts are indecisive for too long a time, the pre-programmed primary target will be photographed automatically,” the report stated. Thus, the MOL astronauts did not directly take the photographs, they provided the inputs to the computer that quickly calculated which targets to photograph based upon the astronauts’ prioritization as well as what the camera could reasonably see during its short period over the target.
The MOL program office performed simulations in mid-1967 “aimed at providing basic engineering data for detailed design of various items in the manned system.” The simulations verified that the flight crews could perform the necessary target inspections at the resolutions provided by the viewing scopes in the time available.
In the late summer/early fall the program office had performed more simulations involving the MOL astronauts. They built a simple static simulator that used actual GAMBIT-1 film. They provided the same views and resolutions that the astronauts would see through the tracking and acquisition scopes in orbit and used both monocular and binocular scene presentations. Seven MOL astronauts participated under controlled conditions.
| The other major value that astronauts provided to the mission was dealing with weather obscuring the targets. |
Tests indicated that the astronauts would be very accurate in correctly identifying highly active targets (over 90 percent correct overall average) and also very accurate in correctly identifying absolutely inactive targets (about 2 percent false alarms). Accuracy between the extremes varied depending upon the subtlety of the activity indicators. Some targets would be obvious, like a missile on its transporter being loaded into a silo. The simulations indicated that “operations against certain, relatively isolated, target clusters offer the potential of significant technical intelligence yield.”
The report stated that the manned system operated in the active indicator mode would provide several times more photographs of targets in which indications of activity are present, and from which considerably more intelligence information would be derived per day on orbit compared to the unmanned system.
In addition to looking for targets and photographing them, the astronauts would report what they were seeing and their comments would be tape-recorded for later transmission to the ground, thus providing an additional database from which intelligence could be extracted. This also would allow ground controllers to understand what was going on and possibly issue new commands to the astronauts.
Everybody complains about the weather (but nobody ever does anything about it)
The other major value that astronauts provided to the mission was dealing with weather obscuring the targets. One of the high priority target areas was the Soviet capital, which included many military installations and defensive sites spread over a large area. These included the Ramenskoye military test airfield—roughly the equivalent to Edwards Air Force Base in California—and an expanding anti-ballistic missile system. Unfortunately for the intelligence analysts, Moscow was a densely populated target area with worse-than-average weather, and therefore the GAMBIT satellites often produced photos of the clouds over Moscow rather than the targets on the ground. But a camera with an astronaut pointing it at Moscow targets would be valuable because the astronaut would be capable of finding and photographing targets that were unobscured.
In contrast to Moscow and its relatively poor weather, other high-priority target areas like the sprawling Sary Shagan anti-ballistic missile facility and Tyura-Tam launch facility had better-than-average weather, reducing the value of astronauts for photographing these sites compared to the unmanned system. For Moscow, the astronauts could successfully photograph 45 percent more targets than the unmanned MOL system, whereas for the latter areas they could photograph only about 15 percent more targets than the unmanned system.
Once an astronaut verified to the ground that a target had been photographed, the NRO could then “designate another primary target for the next photographic access to the same area (in northern latitudes, the next access will occur only one or two days hence).” Simply put, they could cross targets off their list with high efficiency based upon the astronauts’ reports on what they had successfully photographed.
With the unmanned system, the NRO would either have to rely upon a confidence level that the target had been successfully photographed based upon weather forecasts, or wait until the exposed film was returned, processed, and interpreted. For the unmanned system, a reentry vehicle would be returned each week, plus two to three days for developing and interpretation. The manned system using immediate verification could photograph from 10–25 percent more targets per day, with the average being around 18–20 percent more targets per day on orbit than the unmanned system due to the ability to avoid weather.
To calculate these numbers, the program office gathered information on the “verified weather” over the Soviet Union for past reconnaissance missions based on US weather satellite coverage and Sino-Soviet broadcast weather reports and forecasts, although the Soviet weather reports did not always coincide with location or time. They then conducted a simulation by comparing GAMBIT-1 and GAMBIT-3 operations against “verified” clear skies and found that nine percent of the targets were actually completely covered by clouds when they were verified as clear, resulting in the spacecraft wasting film photographing clouds. Another five percent of the targets were partially obscured by clouds or haze. Meanwhile, when GAMBIT was compared to “verified” overcast skies, some seven percent of the targets were actually photographed in the clear, and another six percent were partially seen through gaps in the clouds or heavy haze. If the spacecraft had been commanded to not photograph their targets because the weather information indicated that they were cloudy, those visible targets would have been missed.
| One aspect of the MOL system that remains classified is its ability to photograph other spacecraft in orbit. |
The report explained that photography verification would be an even bigger problem for unmanned MOL than for the GAMBIT spacecraft, since a single target for GAMBIT would usually be the equivalent of several MOL targets because of the latter’s smaller field of view. In other words, GAMBIT might pick up some targets although others might be obscured, but the DORIAN camera had to be pointed directly at the cloud-free targets.
The report added that there was another way that the astronauts could enhance the intelligence collection with the MOL. The manned MOL system would have an alternate camera back that the astronauts would use for conducting the health checks of the camera focus. But this camera back could also be used to carry special film, such as color, infrared, or experimental black and white film. The film would be manually loaded into the camera and photographs taken of specific intelligence objectives. The astronauts would then pack the film up with them for their return to Earth in the Gemini spacecraft.
The report stated confidently that “it is clear that the manned MOL system gives a higher assurance of meeting the resolution goal; should provide a worthwhile intelligence product at the outset; will contribute to the earlier maturing of the unmanned system than would probably otherwise occur; will provide a significantly greater total quantity and larger numbers of photographs of particular intelligence value per day on orbit than will the unmanned system; and finally, has certain additional mission capabilities either unique to a manned system or not practical in the unmanned system at an early date.”
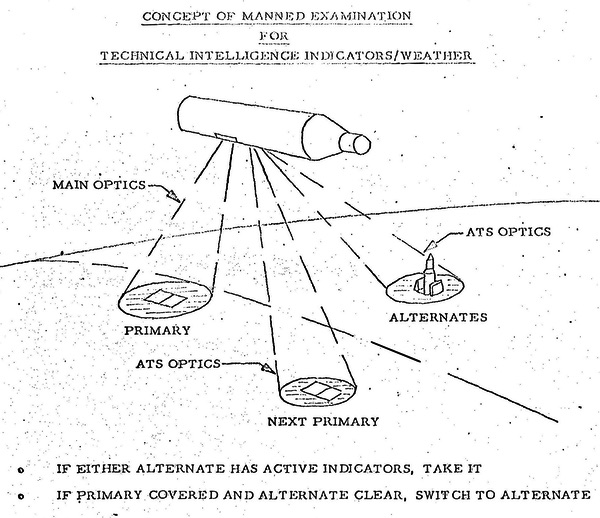 Declassified image showing how the astronauts would have worked with the MOL's onboard computer to select targets that were active and/or cloud-free. If the astronauts provided no input, the computer would have automatically photographed the primary target. (credit: NRO) |
Objects in space
One aspect of the MOL system that remains classified is its ability to photograph other spacecraft in orbit. Almost two pages of the report are deleted and presumably discussed this capability. This was a capability that the intelligence community euphemistically began referring to as “sat-squared,” or “S2,” and was later developed for GAMBIT and used to photograph targets such as the damaged Skylab and the Soviet equivalent to MOL, known as Almaz and operated in the 1970s.
MOL would have some ability to photograph planets from orbit. “The general concept of operations would be to roll the vehicle to the proper attitude for directing the main camera system at the target planet, and then the astronaut would acquire and track the planet using the main optics visual display,” the report stated. However, the DORIAN optics system was not designed for the long exposure times necessary for planetary photography. Photographing Pluto, for instance, would require a 13-second exposure. Exposure times for Saturn, Uranus, Neptune and Pluto all exceeded the planned maximum MOL exposure capability of .08 seconds. But during a simulation, crew tracking capabilities were tested for these targets in case the exposure latitude of the camera was increased in the future. “Crew tracking accuracy was verified as adequate for the task,” the report stated.
The report’s authors were not advocating for using MOL for planetary astronomy. But they noted that the system held great promise for photographing the inner planets even without modification. “In the case of Mars, the resolution attainable by MOL is essentially equivalent to that achieved by Mariner, although a single MOL photograph of Mars would include the entire visible side of the planet.” They qualified their enthusiasm by saying that “the present MOL camera and optical system could only be considered an adjunct to a properly designed orbital observatory. Inherent characteristics of the camera limit its use to photography of the near planets.”
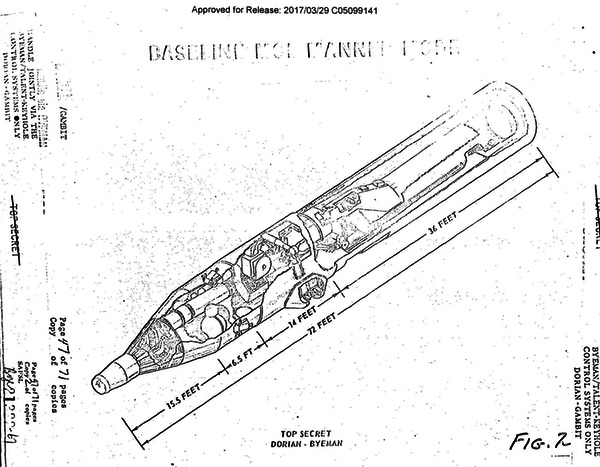
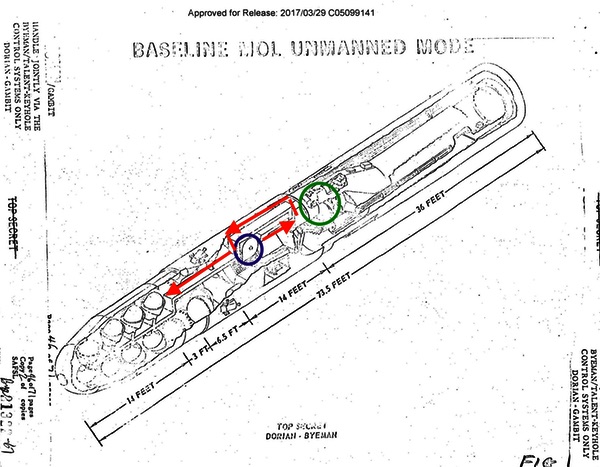 The unmanned MOL would have used many of the same systems as the manned version, but could have operated up to twice as long as a 30-day manned mission. The blue circle shows the film supply, the green circle shows the camera system where the film would have been exposed, and the red arrows depict the film path to the eight reentry vehicles, which would have replaced the Gemini-B. There is no clear reason why the unmanned MOL could not have carried a larger film supply. (credit: NRO) |
Carrying more film
One subject not answered in the report is just how much more film could be carried and returned by the unmanned MOL. The report stated that the plan for the unmanned MOL was for weekly returns of a reentry capsule. A schematic shows the unmanned MOL carrying eight satellite reentry vehicles. The report states that the spacecraft would fly a 30- to 60-day mission, which would enable reentry vehicles to be brought down at a higher rate than once a week.
For the manned MOL, a plan for having the astronauts deploy small reentry vehicles throughout their 30-day mission was apparently deleted by 1967. This meant that all of the film would have to be brought down in the already-cramped Gemini spacecraft. MOL astronauts have admitted that finding a place to store the film for reentry was something that worried them.
| An unmanned MOL could still take many useless photographs and return with many good ones. |
The unmanned MOL had eight reentry vehicles, meaning that it could have undoubtedly returned much more film to Earth than a single cramped Gemini spacecraft. With eight reentry vehicles available, the obvious question was how much more film the unmanned MOL could carry, especially without having to carry all the equipment associated with the astronauts. Cutaway illustrations of the manned and unmanned MOL vehicles show that they both carried the same supply of film. But there was no reason why this had to be so.
Assuming that all the simulations and calculations were correct and the astronauts could operate their DORIAN camera at significantly higher efficiency than the unmanned system, the obvious way to reduce the performance gap would have been to substantially increase the amount of film on the unmanned MOL. If the unmanned MOL was going to fly a 60-day mission compared to half that for a manned mission, it seems logical that it would carry a lot more film. And if the unmanned version was limited because it would not have a human picking out the best targets based upon activity and weather, it seems like designers would have sought ways to equip it to take more photos. During the 1960s, when robotic reconnaissance satellites carried finite amounts of film, if a target was considered important enough, ground controllers would command a satellite to take a photograph even if weather reports indicated it was probably obscured by clouds. They might still get lucky. An unmanned MOL could still take many useless photographs and return with many good ones. Furthermore, with constant advances in electronics and optics, it is likely that Eastman Kodak’s engineers could have developed a reliable automatic focus system for the DORIAN camera system.
By the time that the October 1967 report justifying the value of astronauts for MOL was produced, the program was experiencing increasing pressure, even if not everybody involved—especially the astronauts—were aware of it. The program leadership had really started feeling the heat that summer.
Next: A high-level visitor, and some worrisome news.