A new use for InSight’s robotic armby Philip Horzempa
|

| The digging of trenches by InSight would continue a long tradition of such activity by robot explorers. |
Originally built for the Mars 2001 Lander, the robot arm was stored for more than ten years. It was later refurbished, and requalified, for use on the InSight spacecraft. The arm control team has gained valuable experience not only while deploying the seismometer and probe, but also during the months of operations to assist the tunneling efforts of the mole.
The digging of trenches by InSight would continue a long tradition of such activity by robot explorers. The first proxy to dig into the surface of an alien landscape was Surveyor 3 in April 1967. This produced data on the bearing strength of lunar soil, a crucial precursor measurement for the Apollo missions. The next robot to conduct trenching activity was Surveyor 7, which landed north of the crater Tycho in January 1968.
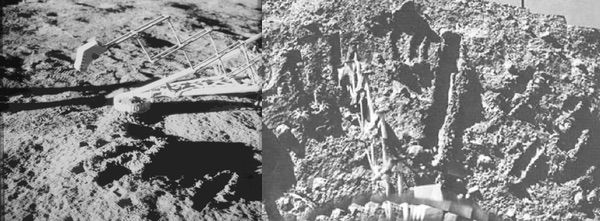 Left: Surveyor 3 robot arm, scoop and trenches on the Moon (Apollo 12 photo). Right: Surveyor 7 robot arm and trench “garden” (credit: NASA) |
Trench-digging took another leap in 1976 with the Viking landings on Mars. The excavations of Viking 1 and 2 were rather shallow since their robot arms provided limited range of motion.
 Viking 1 trench. (credit: NASA) |
It would be another quarter-century before the digging tradition was continued with the landing of Phoenix on Mars in 2008. (This activity would have resumed earlier if the Mars Polar Lander had succeeded in December 1999, as it also carried a robot arm.) The Phoenix lander dug numerous trenches.[1] The goal was not only to deliver samples to onboard instruments, but also to examine the sub-soil. At the Phoenix site, a layer of solid water ice was encountered several centimeters below the surface.
 Trench dug by Phoenix robot arm. (credit: NASA) |
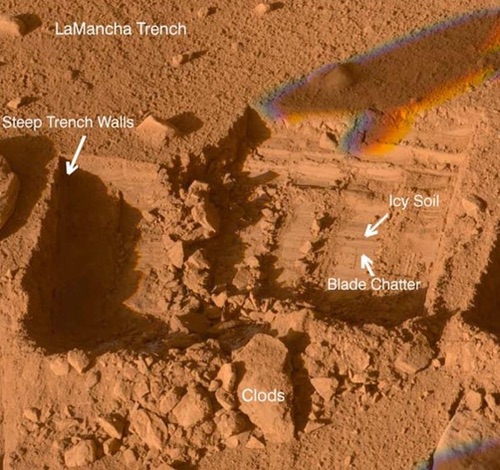 LaMancha trench. (credit: NASA) |
One of the major excavations at the Phoenix landing site was the LaMancha trench. Besides allowing a view of the subsurface, the digging activity produced the Bee Tree Dump Pile from the tailings.
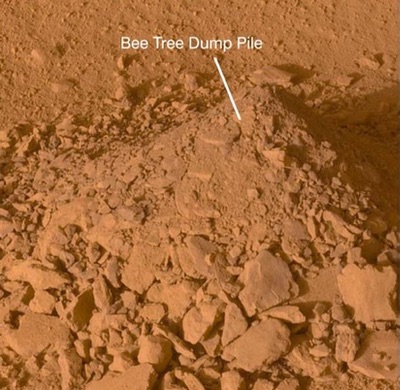 Tailings from LaMancha trench. (credit: NASA) |
If a deep trench is dug by the Insight lander, its tailings pile may prove useful for the HP3 experiment. A recent paper[2] states that to precisely “measure thermal conductivity, the mole need only be buried; to measure geothermal gradients, the temperature sensors must be deep enough that the influence of seasonal temperature variations are sufficiently muted, roughly below 2.5 m.” Therefore, if further attempts by the mole to bore beneath the surface are not successful, some science can still be salvaged by using the scoop and arm to bury the heat probe.
| If further attempts by the mole to bore beneath the surface are not successful, some science can still be salvaged by using the scoop and arm to bury the heat probe. |
At InSight’s landing spot, plumes from its landing rockets dug a pair of holes. They are about 10 centimeters deep and provide a window into what lies beneath the lander. However, they only scratch the surface. Deeper excavation is required.
The same paper[2] includes several comments by the InSight team on the situation that they face at the landing site: “The presence of such a thick (and comparatively strong) duricrust layer was not predicted and is unusual compared to other landing and rover traverse sites.” Later in the paper, they present their summary of layers from top to bottom:
- thin, cohesionless sand and dust (1 centimeter)
- cohesive duricrust (7–20 centimeters)
- poorly sorted, cohesionless sand and rocks (thickness unknown)
- densified sand lens at 35 centimeter depth
Another paper[3] discusses layers that might be found beneath the InSight lander. This essay includes two diagrams depicting their models for those subsurface layers. The first depiction more narrowly focuses on the upper 10 centimeters, the specific layers that the mole has already encountered and which were unveiled by the landing thrusters.
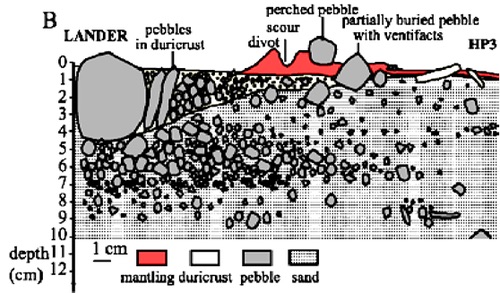 Hypothetical subsurface layers at InSight lander location |
A second diagram illustrates the hypothetical stratigraphy to a depth of 3 meters. An expanded version is shown from the recent Nature geology paper written by the Insight team.[4] The lowest layer is fractured basaltic lava bedrock. Above that are sediments consisting of clastic sediments, with scattered pebbles and rocks. The Insight lander sits on Homestead Hollow, believed to be a 25-meter-wide eroded impact crater. The center of the crater is thought to be two to three meters deep and is filled with fine, windblown sediments, with scattered cobbles.
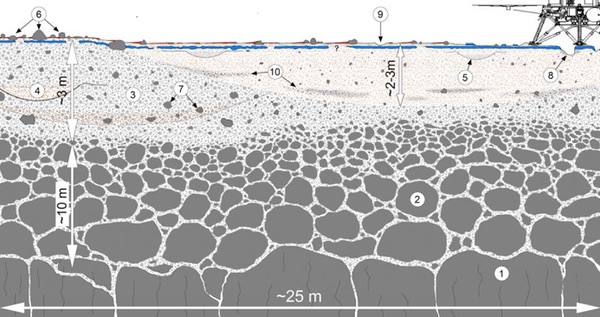 Hypothetical deeper subsurface layers at InSight lander location |
A recent paper from the SEIS team[5] states that data from InSight’s seismometer imply that the landing site has an “upper layer of relatively unconsolidated aeolian material that filled Homestead hollow after its formation.” This model was derived from the seismic signatures of dust devils that passed near the InSight lander.
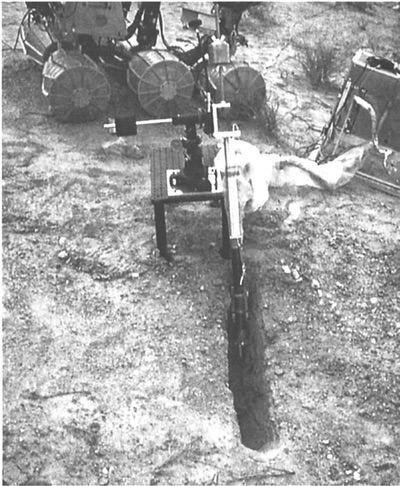 Marsokhod test trench |
In 1994, ground tests were conducted with a Russian Marsokhod prototype.[6] The photo of a trench dug during those tests provides an idea of what a similar excavation might look like at the InSight location. The depth and width of an InSight trench will be dictated by what it encounters and the operating range of its arm. However, this will be exploration, with surprises to be expected.
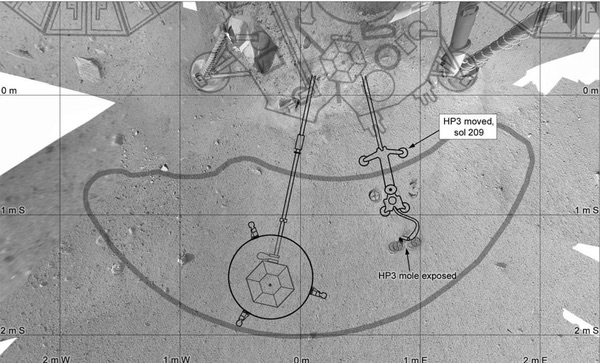 InSight workspace (credit: Phil Stooke) |
| The lander’s arm and scoop, while still able, should pursue a campaign of direct exploration of the subsurface. This new science objective represents an opportunity to add to the accomplishments of the InSight team. |
The above diagram shows the workspace in front of the Insight lander. The best place for a deep trench may be the sector to the west of the SEIS instrument. However, if it is decided that tailings should be used to bury the HP3 sensor, then the east side would be preferred.
Whether the attempt to push the mole into the ground succeeds or not, a deep trench should be excavated. It will continue the tradition begun by Surveyor 3 half a century ago. However, dust accumulation on InSight’s solar panels creates an “hourglass” power limit for use of the arm. The lander’s arm and scoop, while still able, should pursue a campaign of direct exploration of the subsurface. This new science objective represents an opportunity to add to the accomplishments of the InSight team.
References
- Arvidson et al. Results from the Mars Phoenix Lander Robotic Arm Experiment; 2009.
- Golombek et al. Insight HP3 Mole Near-Surface Motion and Subsurface Implications; 2020.
- Ansan et al. Insight Landing Site: Subsurface Stratigraphy and Implications for Formation Processes; 2019.
- Golombek et al. Geology of the Insight Landing Site on Mars; Nature, 2020.
- Banerdt et al. Initial Results from the Insight mission to Mars; Nature, 2020.
- Stoker et al. The 1999 Marsokhod rover mission simulation at Silver Lake, California: Mission overview, data sets, and summary of results; 2001.
Note: we are temporarily moderating all comments submitted to deal with a surge in spam.