Mobility and surface access lessons for the Artemis lunar landerby Philip Horzempa
|
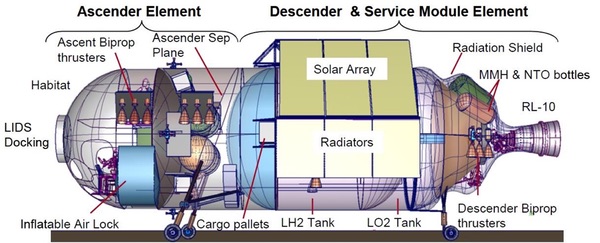
| The center of gravity of a low-profile lander translates into an inherently stable vehicle during, and after, landing. |
The diagram above shows the basics of Lockheed’s lunar lander. It consists of two modules, the Centaur descent stage and a separate Ascender stage. There were several variations in Lockheed’s proposal. Option 1 took the Centaur all the way to the surface, while Option 2 discarded it during the final descent phase. In both concepts, the propulsion duties of the final approach and landing were handled by arrays of small thrusters on the side of the Ascender stage, with the help of small thrusters on the Centaur in Option 1.
A major concern is the rolling lunar terrain. Even with pinpoint landing, subtle craters can create a hazardous situation. This was demonstrated during the Apollo 15 mission, as shown in the photo.
 |
One of the positive aspects of the low-profile, horizontal lander is its view of the landing site, as described in one document. “Placement of the pilots forward with panoramic, downward facing windows ensures that the pilots have complete situational awareness as they descend and touch down on the lunar surface. The small, high mounted lateral thrusters minimize dust entrainment and associated loss of visibility during the critical terminal descent and landing. These small lateral thrusters provide the crew with unparalleled maneuverability enabling late course changes to avoid surface obstacles.”[2]
A tall structure is less stable, especially during the flight dynamics of the last seconds of descent. The center of gravity of a low-profile lander translates into an inherently stable vehicle during, and after, landing.
Crew access to lunar surface
A significant advantage of a low-profile lander is pointed out: “Once the lander arrives on the Moon, it must support repeated crew access to the surface for EVAs, and enable loading and unloading of cargo. Due to the size of the propellant tanks and engines, many lander configurations place the crew and cargo high above the surface.”[1] Using the Centaur LEM, the surface is only a few steps away. There is no need for elevators or a grand staircase.
With numerous lunar sorties, it’s likely there will be cases where rapid ingress is required. Ascending to a cabin many meters above the surface would present a formidable challenge when trying to help a fellow astronaut to safety. By contrast, the Centaur LEM’s cabin door can be accessed by merely stepping up from the surface.
The low-profile lander design can easily incorporate an inflatable airlock. “Once on the lunar surface the crew accesses the surface without ladders or other impediments through an under-belly airlock. The airlock deploys down and out...similar to opening bomb bay doors on an aircraft. The airlock is very large and has two exterior doors. Being below the main cabin it acts as [a] ‘dust room’ where the crew can take off, clean and stow their suits prior to entering the main cabin.”[2]
This design will minimize the amount of lunar dust carried into the Ascender module. With numerous EVA sorties, this becomes especially important to the health of the astronauts and to the proper functioning of hardware inside the main cabin.
 Ascender Module |
Cargo
The Lockheed lander concepts were designed to place both the exploration team and payloads as close to the surface as possible. “Many experiments and supplies will come in small packages, approximately the size of a suitcase, some of which will be in the pressurized crew cabin, and some of which will be mounted to the outside of the lander...the astronauts should be able to unload these from the lander while standing on the ground.”[1]
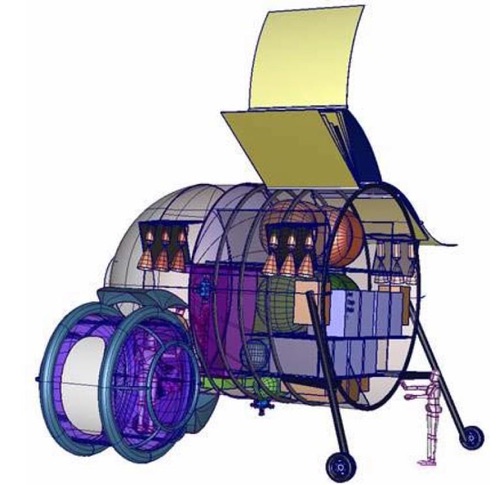
| A lander with mobility would allow the surface teams of the first Artemis missions to cover a good deal of terrain even if a simple rover was not yet available. |
Pallets “can be lowered directly to the surface via simple mechanisms” and without engaging the crew in “elaborate deployment procedures.”[1] In addition, the low-profile aspect of the lander “provides easy surface access for even the largest payloads, eliminating the need for unique surface handling equipment such as cranes and completely avoids crew risk associated with working under suspended loads.”[2]
This design approach “can support large robotic exploratory missions and emplace major lunar base elements prior to the first crew missions.”[2] Large payloads could be sent to the Moon on dedicated missions with the cargo flying in place of the astronaut module.
Mobility
NASA’s recent Artemis III Science Definition Report stated that “NASA should include a rover or other mobility solution for crew use on the lunar surface starting as early in the Artemis program as possible.” It pointed out that such a capability will provide greater access to the various geologic regions on the Moon.
The low center of gravity of the Agile LEM provides for mobility with minimal risk of tipping over. This would be a boon for lunar science and exploration, as their proposal explained:
Lockheed Martin has identified three scenarios in which a mobile lander will be useful. During initial exploration sorties the crew will try to explore a wide area around the landing site. Complex target landing site regions, such as Aristarchus, are on the order of 100 km (60 miles) across and include dozens of individual science ‘stations’ at local features of interest. If the crew is limited to an unpressurized rover returning to a fixed lander at the end of each EVA, they will lack the range to reach many of the features. They will spend much of their time driving out and back over the same territory each day to reach nearby sites.
A long range pressurized rover would be desirable but is very large, heavy and expensive, and would require a dedicated cargo launch. Adding limited mobility to the lander instead, in the form of wheels, suspension, and electric motors, provides substantial advantages. While the crew drives out to explore a nearby feature the lander can move slowly (on the order of 1 km per hour would be sufficient) in a direction that reduces the astronaut’s return commute and brings the lander closer to the next day’s science stations. Over the course of a 7-14 day mission the mobile lander could cover on the order of 100 km (60 miles). The astronauts would be able to explore many sites that would otherwise be unreachable, and would use their time more effectively.
For this scenario the lander can have very slow mobility speeds and shallow slope limits, because the astronauts still use the small rover to actually approach specific sites. This enables low power draw, a simple suspension, and teleoperation from Earth, all of which make mobility easier to implement.[1]
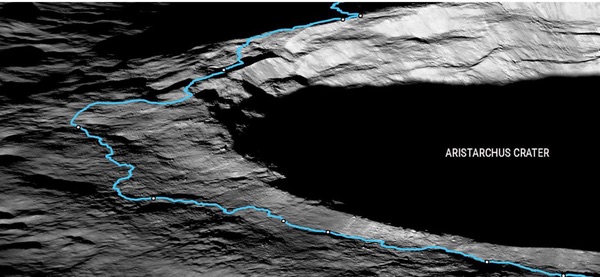 Proposed route of Intrepid Moon rover |
A lander with mobility would allow the surface teams of the first Artemis missions to cover a good deal of terrain even if a simple rover was not yet available. While the astronauts are conducting a typical eight-hour EVA, the Agile LEM will slowly crawl along behind them. The mobility of this “Lunar Kibitka” means that during much of the EVA, the surface team will only be a few hundred meters away. Their mobile base will be within easy walking distance at the end of the day. After the surface team has returned to the LEM, it could continue its slow drive, heading for the next day’s area of study.
With a lander nearby, issues such as a suit leak can be handled expeditiously. A low-profile, mobile lander translates into proximity and easy access. These are key factors when time is of the essence. The wheel design to be used with the VIPER rover is one candidate to be used for an Agile LEM. NASA’s Spring Tire, which uses a shape-memory titanium-nickel allow, is another option.
| A lander team that includes three members would allow a more efficient program of lunar surface exploration. While two astronauts are conducting a moonwalk, the remaining crewmember would remain onboard the LEM. |
Even with a rover, as occurred during the Apollo expeditions, time would still be spent driving back to a fixed lander. “It should be noted that even when using the Apollo LRV, walk-back constraints were still the limiting factor on the achievable exploration radius from the lunar module: in case of an accident with the LRV, the crew had to be able to walk back to the lunar module before their consumables ran out.”[3] A mobile lander will always be “trailing” a rover, thereby enabling increased exploration range and a backup rescue capability. If that rover became unusable, the mobility of the lander would allow many science goals to be attained.
A mobile lander would have benefited past missions such as Apollo 14. Alan Shepard and Ed Mitchell had to trudge almost two kilometers (one way) from their Lunar Module in order to reach the vicinity of Cone Crater’s rim. By that time, they were tired and racing the clock. They never reached the rim was and sampling of the crucial Fra Mauro deposit was rushed.
With a mobile LEM, Shephard and Irwin could have walked a mere 500 meters to reach their goal. That would have allowed them ample time to find the rim of Cone Crater and to conduct a thorough sampling campaign. Instead of a four-kilometer round trip, they would have covered only one kilometer during that EVA, leaving them rested and ready.
Mobility and base logistics
Future activities will benefit from the Lunar Kibitka’s experience, as the Lockheed proposal explained. “Lander mobility will also be valuable once a lunar base has been established. When the lander touches down it will kick up high-velocity dust and gravel. In order to protect the base, landings will happen hundreds of meters – perhaps a kilometer – away from the base itself. Unloading and transporting the crew and cargo over this ‘last mile’ turns out to be a significant challenge. It will likely drive requirements for additional rovers, trailers, and support fixtures. If instead the lander could be driven or towed from the landing point to the ‘front door’ of the base this would greatly simplify operations.”[1]
Components of Surveyor 3 that were returned by Apollo 12 provided insight into the effects of a lander’s thruster plume. Parts of the Surveyor lander had been “sandblasted” by hypervelocity particles accelerated during the nearby descent of the Lunar Module.
Lunar and Martian bases will incorporate a number of individual modules. Mobility will be essential in connecting those hardware elements. Ancillary equipment to move the base’s components would be unnecessary. One can foresee a time when an arriving team can simply drive their lander up to the base, dock, then enter the base without requiring an EVA.
Powered hops
Another option for increased mobility is provided by the use of smaller thrusters on the lander. The Lunar Kibitka “can be used for transport from the lunar base to more distant science sites. The ability to refuel this vehicle turns it into a rocket powered helicopter with all the utility that that implies. Robotic systems can be quickly delivered to remote locations without long overland journeys. Crews can be dispersed but also rapidly returned to the base in the event of adverse space weather. The ability to efficiently deliver large cargos and especially propellants to the lunar surface is hugely enabling for the exploration of remote sites.”[4] The Nova-C lunar lander by Intuitive Machines may test this hop maneuver after it lands on the Moon later this year.
Surface hopping may be more suitable for exploring the diverse regions on Mars that are separated by long stretches of hazardous terrain. The Hercules Mars Hopper concept (pictured here) is designed for sorties with a “minimum of 50 km roundtrip range” on the Red Planet.[5] The lunar version would have a roundtrip reach of 125 kilometers.
 |
Recently, NASA has been considering a conjunction-class mission for its first Martian expedition (see “A long journey but a short stay on Mars”, The Space Review; February 1, 2021). Astronauts would spend only four weeks (out of a two-year mission) on the surface of Mars. Time will be at a premium. If the women and men on the EVA surface teams are limited by walk-back constraints, then mobility will be even more important. At a minimum, the mission should include a lander with wheels. However, an aerial hopper would allow the teams to access more terrain. If there is a way to refuel the Mars Hopper, that access will be vastly increased. Concerns about limited science return from a four-week stay time would be greatly alleviated.
Proxy landing
The NASA Advisory Council has recommended that an Artemis lander should conduct an initial checkout mission to the Moon without astronauts at the controls. The Agile LEM’s design would allow useful science to be conducted during such a test. Science instruments could be attached to its exterior. The low-profile design would allow a simple robot arm to access the surface. The lander’s mobility would put a variety of rocks within reach. These samples would then be delivered to lunar orbit during a demonstration of the vehicle’s liftoff and orbit-insertion capability.
Crew size
A lander team that includes three members would allow a more efficient program of lunar surface exploration. While two astronauts are conducting a moonwalk, the remaining crewmember would remain onboard the LEM. She would oversee the EVA from the cabin and would assist in guiding the module as it slowly drives across the lunar surface.
| A low-profile lander translates into easy surface access and increased safety for the exploration team. Mobility will be a force-multiplier, allowing surface teams to reach numerous locations during a time-constrained mission. |
On the next day, she would be part of the duo that ventures outside. She would join one of the EVA team members from the day before, while the other Moon walker would continue the tasks that she had conducted inside the Lunar Kibitka. This rotation of assignments allows the most efficient use of astronaut time, while providing a needed rest after two days of EVA sorties. Eliminating the need for a fourth astronaut translates into a better mass margin for the Agile LEM. The spacesuit, food, water, and sleep station for one additional person would be unnecessary. Reduced mass translates into reduced cost, complexity, and risk. This “reverse snowball” effect means that hardware will be ready to travel to the Moon much sooner.
Additional capability
With multiple surface treks, the supply of oxygen becomes a factor. However, if a lander is designed with a large solar array “it is practical to pump down the airlock instead of simply venting the gas during each airlock cycle, supporting a demanding lunar surface schedule.”[2] This would allow for numerous airlock cycles using a limited amount of oxygen.
The proximity of the Lunar Kibitka during surface excursions allows sophisticated instruments to be readily available to the exploration team. For example, a deep drill need not be carried by the astronauts to a point of interest, then returned to the lander. Rather, the lander delivers the drill to each target site. The mobility of the lander means that many deep cores can be obtained from a variety of bedrock and regolith strata.
Conclusions
There are several factors to consider when NASA chooses an Artemis lander. After landing, how easy will it be for the crew to access the lunar surface? How difficult will it be to unload cargo? What is the range of surface exploration? A low-profile lander translates into easy surface access and increased safety for the exploration team. Mobility will be a force-multiplier, allowing surface teams to reach numerous locations during a time-constrained mission.
References
- Lunar Lander Configurations Incorporating Accessibility, Mobility, and Centaur Cryogenic Propulsion Experience; Birkenstaedt et al; 2006; Lockheed Martin Space Systems Company
- Robust Lunar Exploration Using an Efficient Lunar Lander Derived from Existing Upper Stages; Kutter et al; 2009; United Launch Alliance
- Analysis of Architectures for Long-Range Crewed Moon and Mars Surface Mobility; Hofstetter et al; 2008
- A Commercially Based Lunar Architecture; Zegler et al; 2009; United Launch Alliance
- Lunar and Mars Ascent and Descent/Entry Crew Abort Modes for the Hercules Single-Stage Reusable Vehicle; Komar et al; 2018
Note: we are using a new commenting system, which may require you to create a new account.