Barnstorming the Moon: the LEM Reconnaissance Moduleby Philip Horzempa
|
| The key element in the Grumman proposal was the LEM and the suite of cameras that it would carry in a payload module attached to the Ascent Stage. Equally important, the Recon LEM would carry a bevy of landing probes. |
In an effort to find out, NASA issued a request for proposals (RFP), specifically MSC-63-624P, titled “Reconnaissance System Study for Manned Lunar Missions.” In response, the Grumman Aircraft company in September 1963 put forth a proposal that would use their LEM (Lunar Excursion Module) for this task.[1] The modified craft, hereinafter referred to as the Recon LEM, would survey candidate sites with a suite of cameras packed in a dedicated module.
Another option for site verification was the Lunar Mapping & Survey System (LMSS) project (see “Project Upward: hauling the NRO’s GAMBIT to the Moon”, The Space Review, September 15, 2014). The LMSS was a joint project between NASA and the NRO with the classified name of Upward. It was designed to carry Kodak’s KH-7 camera either in the Apollo Service Module or in a modified Gambit satellite docked to the Command Module
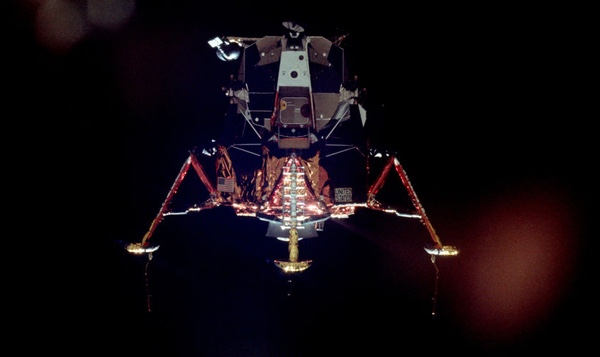
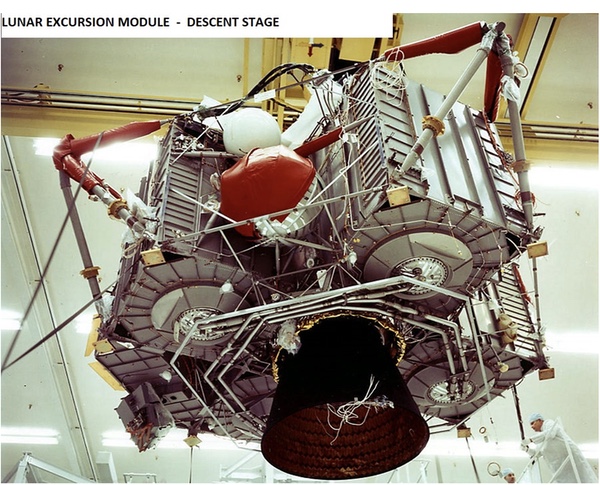
By contrast, Grumman’s Recon LEM would become a free-flyer once it arrived in lunar orbit. The LEM was ideal for this mission, able to change its orbital altitude and inclination with ease. After undocking from the Apollo Command Module (CM), it would use its Descent Propulsion System (DPS) to enter an orbit that dipped as low as eight nautical miles (15 kilometers) above the lunar surface.
The key element in the Grumman proposal was the LEM and the suite of cameras that it would carry in a payload module attached to the Ascent Stage. Equally important, the Recon LEM would carry a bevy of landing probes. These craft would alight on the Moon’s surface, providing ground truth on the nature of candidate sites. The goal of the Recon LEM was obtaining the required reconnaissance data during a very compressed timeline. The longest proposed mission spanned two days in orbit, while the shortest completed its mission within five lunar orbits, or 10 hours. It was vital to get some amount of detailed data, even if all of the target sites could not be surveyed. Some information, on some sites, would be a gold mine compared with the utter lack of knowledge at that time.
A secondary goal was wide-area mapping of the Moon. The best resolution from Earth-based telescopes was on the order of several hundred feet (hundreds of meters). To better understand the Moon, maps with a resolution of tens of feet (several meters) were required. The cartographic camera onboard the Recon LEM could provide the photos needed to create those maps. The basic game plan was for the Recon LEM to undock from the CSM (Command and Service Modules) and transfer to lower-altitude orbits. This would enable the highest resolution for the photographic surveys.
Equally important as photography was the payload of Drop Probes. As it barnstormed the Moon, the Recon LEM would drop these small landers at potential Apollo sites. Several thousand kilograms of probes were attached to the LEM Descent Stage and they were designed to survive either a soft or hard landing. Their main mission was on-site certification of a landing area. The secondary function of the probes was their use as landing beacons for a LEM. It was felt that smooth, safe patches of terrain might be scarce. If a lander was able to certify a site, then its onboard beacon would guide the LEM to what could be a patch of ground only a few hundred feet (about a hundred meters) in diameter. A beacon would provide the guidance required to steer a descending LEM away from hazardous terrain.
| The Recon LEM, in some ways, was more akin to a reconnaissance aircraft. The sporty, lightweight LEM was able to survey sites on the Moon from altitudes at which the U-2 flew over the Earth. |
During this era, Grumman had proposed modifying the LEM for a variety of missions. Its design was inherently flexible, allowing it to serve as a lunar taxi, high Earth orbit relay satellite, or a lunar shelter. In the end, the only project to use a modified LEM was the Apollo Telescope Mount (ATM) project. However, even that effort was later dropped when the ATM design was modified to be launched as an integral part of the Skylab orbital workshop.
For the mission to survey the Moon, a payload bay carrying the survey cameras was attached to the top of the Lunar Excursion Module. This section was pressurized and could be accessed by opening the top hatch of the Ascent Stage. A new hatch was located in the top of the instrument module to allow normal docking with the Apollo CM.
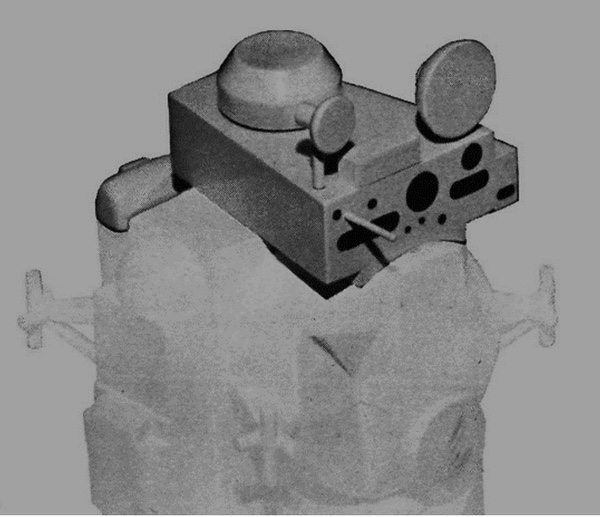 Instrument Module atop the LEM (credit: Grumman Aerospace) |
In this view, the rendezvous radar antenna has been relocated atop the recon package. It is the smaller of the two antennas, with the larger one designed for radar scans of the Moon.
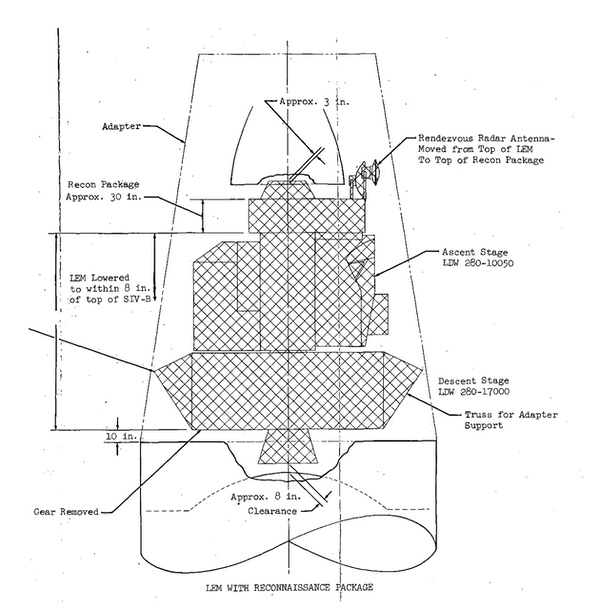 |
This diagram illustrates how the modified LEM could be accomodated within the existing SLA (Saturn LEM Adapter). The Recon Bay atop the LEM Ascent Stage would normally crowd the Service Module SPS engine bell. However, the omission of landing legs allowed the vehicle to be lowered succificiently to overcome that packaging problem.
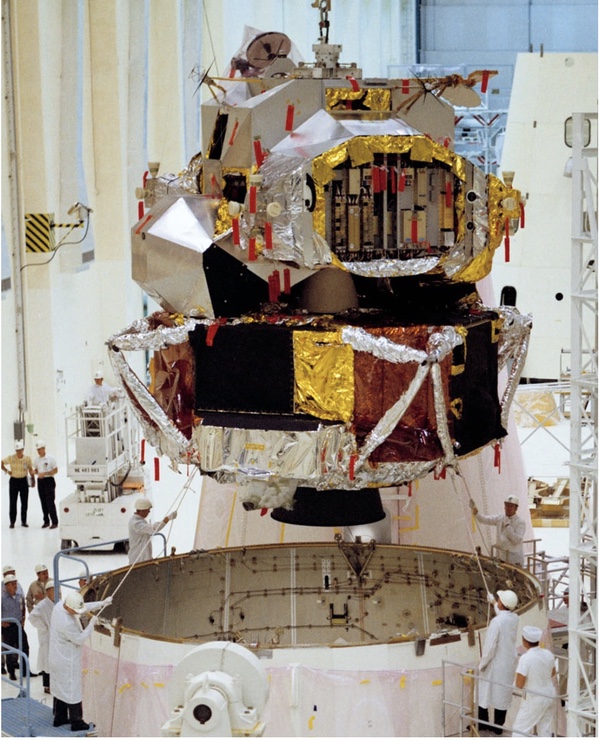 Lunar Module and lower section of SLA (credit: NASA) |
 (credit: Grumman Aerospace) |
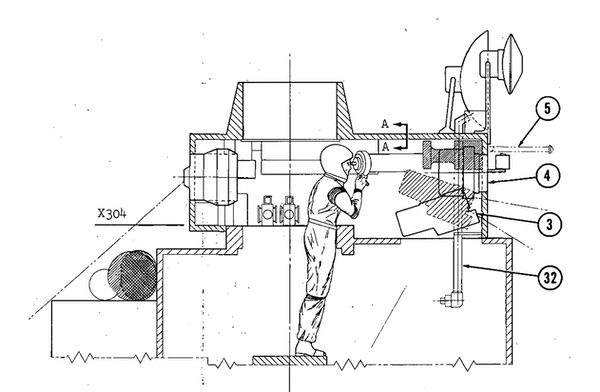
A variety of cameras were carried in the Recon module. In this diagram, an astronaut is “standing” on the Ascent Engine cover while his upper body is inside the payload module. He is shown using the spotting telescope equipped with a camera. To quote the Grumman report: “The 48 in. camera and telescope combination would be the primary site verification instrument on board. With it, a crewman can inspect the terrain for interesting features during a low-altitude pass, zoom the eyepiece to higher power at particular points, and record the image with the camera.”
 (credit: Grumman Aerospace) |
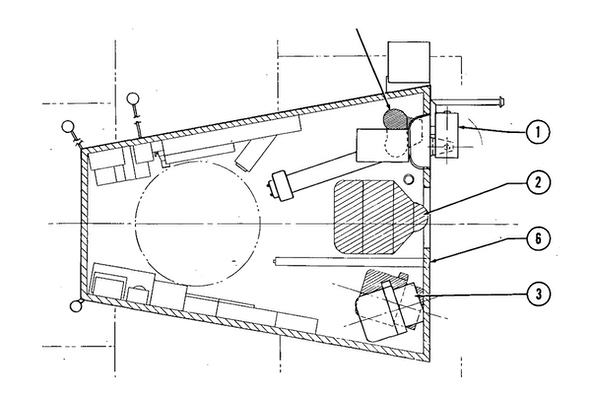
The array of cameras are indicated in this overhead view. The large circle to the left is the hatch that led to the Ascent Stage. Camera #1 is the spotting telescope. Device #2 is a large panoramic camera with a suggested focal length of 24 inches (60 centimeters). It could produce high-resolution photographs with a wide field of view. Device #6 is a wide-angle viewfinder, while #3 is a cartographic camera with a focal length of six inches (15 centimeters) and a nine-by-nine-inch (23-by-23-centimeter) film format.
 U-2 Camera Payload (credit: Department of Defense) |
The Recon LEM, in some ways, was more akin to a reconnaissance aircraft. The sporty, lightweight LEM was able to survey sites on the Moon from altitudes at which the U-2 flew over the Earth. The Grumman report mentions a 24-inch (60-centimeter) focal length camera, but provides no additional details. However, the reconnaissance camera onboard the U-2 spy plane may have been a candidate for that role. In fact, the outline in the Grumman report bears some resemblance to that used on the U-2.
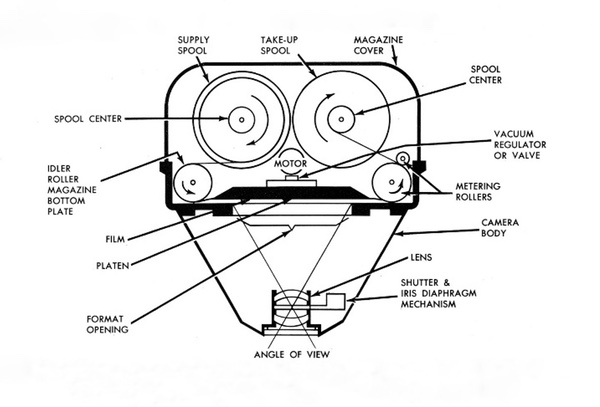 U-2 camera; 24-inch focal length (credit: United States Air Force) |
At an altitude of 15 nautical miles (28 kilometers), the U-2 camera had a resolution of 2.5 feet (0.8 meters). At the Recon LEM’s closest approach of eight nautical miles (15 kilometers), this camera was close to providing Grumman’s resolution goal of one foot (30 centimeters) for the Apollo site survey.
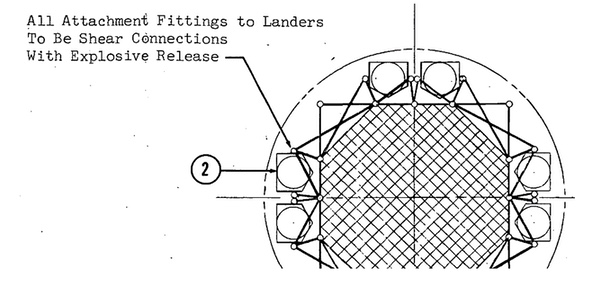 Probe Placement and Deployment Mechanism (source: Grumman Aerospace) |
Probes and beacons
The mission of the Recon LEM included deploying small landers at each candidate site. There were four types of probes, with weights ranging from 400 to 1,000 pounds (180 to 450 kilograms). The Grumman report provides few details of these devices and their payloads. It does list the two categories of data needed to verify a site, i.e., surface bearing strength and roughness of terrain.
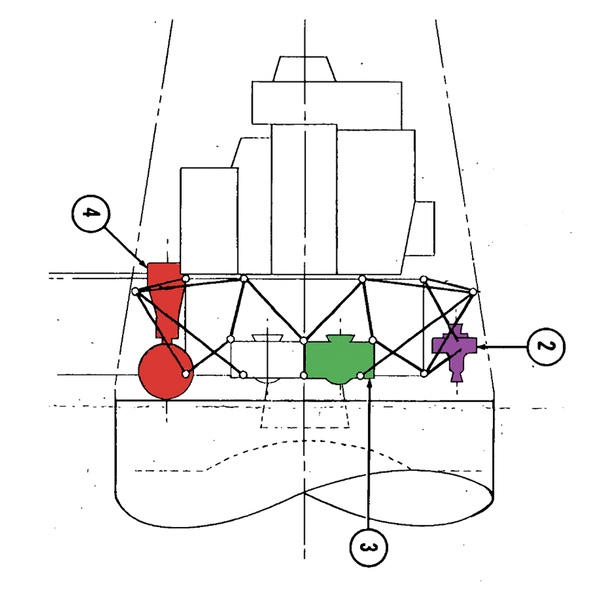 |
This color-coded diagram highlights the various classes of Probe designs. There were 4 designs in total, and this illustrates how they would be attached to the LEM Descent Stage.
Probe 1: Soft Lander, 1,050 lbs. (475 kg)
Probe 2: Semi Soft Lander, 300 lbs. (135 kg)
Probe 3: Hard Lander, 850 lbs. (385 kg)
Probe 4: Hard Lander, 425 lbs. (190 kg)
The main goal of these probes was to verify, from the surface, the suitability of sites for Apollo landings. To quote the Grumman report: “Potential probe designs… can range from simple unguided hard-landers to sophisticated soft-landers with inertial platform guidance systems, with a corresponding increase in landing accuracy.” The report points out that the “actual number carried would be a function of the size and weight of the selected probe; however it appears that eight hard-landers can be easily accomodated.”
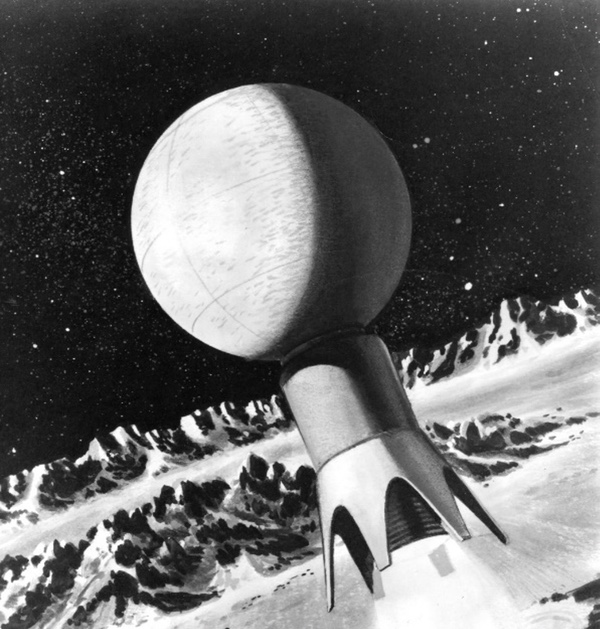 |
There are sparse details on the capabilities and design of these landing craft. The design of the small landers developed for the Ranger program may provide some insight. Outwardly, the Ranger landers resemble Probe 4 from the Recon LEM document. A small solid rocket motor (SRM) decelerates the probe, allowing it to survive a rough landing. After touchdown, its main task is a basic survey of the site, assessing its suitability for Apollo missions. Surveyor was designed to perform detailed measurements, but these simpler probes would serve as a backup for those more sophisticated soft landers.
| Early in the Apollo program, NASA planned to land an automated LEM on the Moon equipped with a TV camera to image its landing site. |
At this point in the Apollo program, there was an emphasis on the use of beacons to assist a Lunar Module. Since so little was known about the safety of the lunar surface, it seemed that the best plan would be to have landing aids emplaced on a certified site. When the LEM entered its final descent phase, it could home in on the signals generated by those devices. The circular error probability (CEP), i.e., targeting precision, of a descending LEM was a crucial factor in preparing for the first Apollo landing. The presence of a beacon would allow the Lunar Module to land within 100 feet (30 meters) of the center of a designated site.
The importance of beacons was evident at a meeting held to discuss landing aids that could be carried to the Moon by the Surveyor landers.[3] The subject was “the requirements and status of projects underway as they related to the landing aid problem.” A variety of options was discussed, including a Surveyor-deployed transponder. Active beacons as well as passive devices such as corner reflectors were also on the agenda. There was even consideration given to visual markers. These would be “visible during terminal phase and landing only; visible during terminal phase and landing as well as from lunar orbit; or visible during terminal phase and landing from lunar orbit as well as photographically from the unmanned Lunar Orbiter.”
The smallest probes carried by the Recon LEM may have had a very basic goal. The Grumman report stated “preliminary indications are that a relatively simple hard-lander with a beacon could perform an acceptable mission. The primary design problems would be in the areas of a survivable instrumentation and communication payload, and an adequate power supply for the beacon. However, these do not represent serious design problems, since hardware has already been developed in these areas (e.g., Ranger impact capsules and SNAP 3 plutonium radioisotope).” One option for a simple probe is seen in this illustration from a trade magazine of that era. It included an array of X-band antennas that would provide a radio beam detectable by the LEM rendezvous radar.
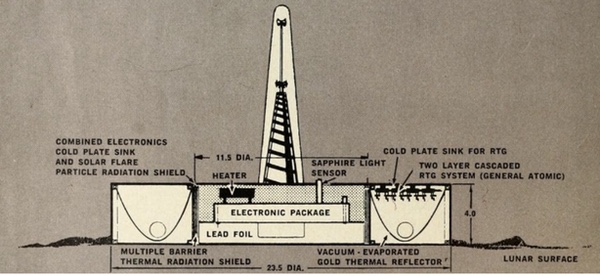 (credit: Missiles & Rockets) |
NASA interest in precursor probes continued up to 1965 when it studied the Lunar Survey Probe (LSP) concept. In response, Hughes Aircraft proposed using a modified Surveyor lander that could be deployed from an orbiting Apollo spacecraft.
Though not mentioned in the Grumman report, there were other ideas afloat at the time for non-imaging tasks for drop probes. In their Upward proposal to NASA, Eastman Kodak outlined what could be accomplished: “The crew can also take action of another sort; specifically, the placement of special devices on the lunar surface. Examples might be: explosive [charges], the effects of which could be photographed on impact with the surface or when radio controlled (detonation) was induced on a subsequent orbit, surface dyes whose rate of disappearance would be recorded, objects ejected from the satellite to mark the surface, or flares to illuminate polar valleys hidden from sunlight.”[2] Experiments of this type were to be deployed by a proposed series of advanced Lunar Orbiters.
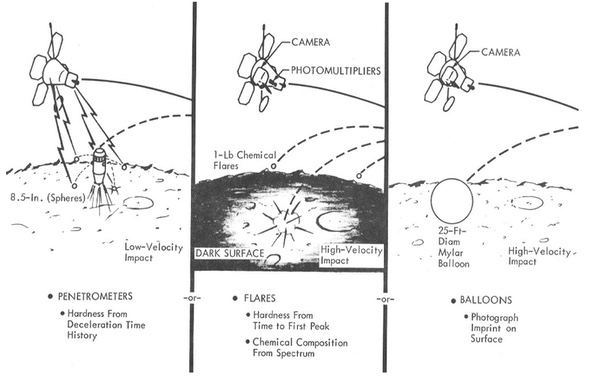 Lunar Impact Probes (credit: The Boeing Company) |
There was one more effort that might have provided ground truth. Early in the Apollo program, NASA planned to land an automated LEM on the Moon equipped with a TV camera to image its landing site (Aviation Week and Space Technology; Jan. 10, 1966, p.36). This concept was also mentioned in the NRO’s history of the Upward project.
 |
Barnstorming the Moon
The key to the Grumman proposal was the LEM’s ability to fly independently of the CSM. Its Descent Propulsion System (DPS) provided the necessary delta-V to adjust its orbit which, in turn, would allow a greater area of the Moon to be surveyed during a short stay in lunar orbit.
The main object of this precursor mission was to obtain site photographs as quickly as possible. When these missions were being formulated, there may have been an expectation that the hardware would not support missions that were longer than one week. Equally important as a mission objective was wide-area mapping of the near and far sides of the Moon. At that time, only the low-resolution photos from Luna 3 were available.
| The main object of this precursor mission was to obtain site photographs as quickly as possible. |
This excerpt from the Mission A game plan illustrates how each orbit was filled site reconnaissance, probe deployment, and orbital adjustments. The LEM (docked to the CSM) would first enter a circular, equatorial, 80-nautical-mile (148-kilometer) lunar orbit. After separating from the CSM, the Recon LEM’s mission would begin in earnest. To quote the Grumman report, “Proceeding step by step from here, elliptical (8-n. mi pericynthion) orbits are then interspersed with the mapping orbits for probe dropping and site-verification photography.” There were also large maneuvers to “crank” the orbit, i.e., change orbital inclination and line of nodes. That would allow the Recon LEM to survey a greater portion of the Moon’s surface during a short mission.
The six DPS burns designed to rotate the orbital inclination were significant maneuvers, with each involving a delta-V on the order of 500 feet per second (150 meters per second). By contrast, DPS burns to alter orbital altitude required a mere 25 feet per second (8 meters per second) of delta-V.
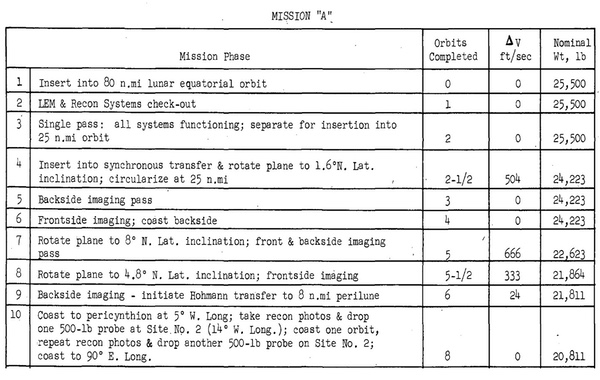 |
After five mapping orbits at 25 nautical miles (46 kilometers), the orbit was adjusted to begin photo surveys of candidate landing sites. During each low pass at eight nautical miles (15 kilometers), the Recon LEM would deploy one of the landing probes. After scouting Sites #1 and #2, the descent engine would again inject the LEM into a circular orbit of 25 nautical miles for more wide-area mapping of the Moon. Following that, it was back to a low-altitude orbit.
These maneuvers would burn a significant amount of fuel, an average of 2,500 pounds (1,130 kilograms) for each burn. By the end of its recon duties, the mass of the LEM would have decreased from an initial 25,500 pounds (11,600 kilograms) to a final 14,000 pounds (6,350 kilograms) before it jettisoned the descent stage. The total delta-V was 4,000 feet per second (1,200 meters per second), about 80% that of a lunar landing. Eight probes were to be dropped, each with a weight of 500 pounds (225 kilograms), for a total of 4,000 pounds (1,800 kilograms). Mission A would be complete after 20 orbits of the Moon.
There were also two shorter mission plans for the Recon LEM. Option B devoted most of its time to wide-area mapping of the Moon over the course of six orbits. After dropping the pericynthion to eight nautical miles, the Recon LEM would survey several landing sites during two more orbits. It would also drop a total of 7,000 pounds (3,200 kilograms) of probes, though the report does not list the types that were carried.
Plan C was the simplest of all, with photography and probe deployments completed in six orbits. The LEM would remain docked to the CSM while conducting wide-area mapping. Also, while docked, the DPS would be fired several times to change the orbital inclination. The LEM would then undock, quickly surveying landing sites and dropping 5,000 pounds (2,300 kilograms) of probes in the span of only two orbits.
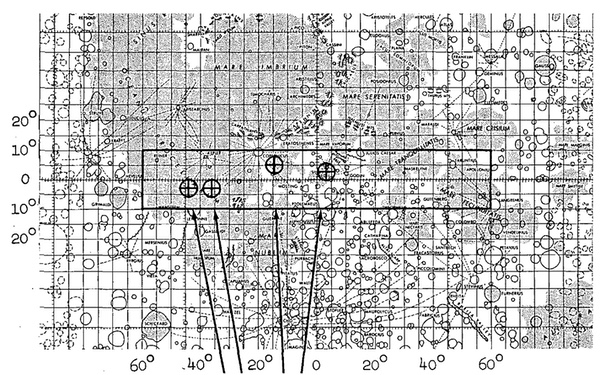 Recon LEM Survey Sites (Aeronautical Chart and Information Center; USAF) |
The LEM reconnaissance mission plan focused on four targets on the Moon in the equatorial Apollo zone. They are all located in the western sector of the near side, to be observed during the last quarter phase of the Moon. This timing was dictated by orbital dynamics as it would allow a daytime splashdown of the Command Module.
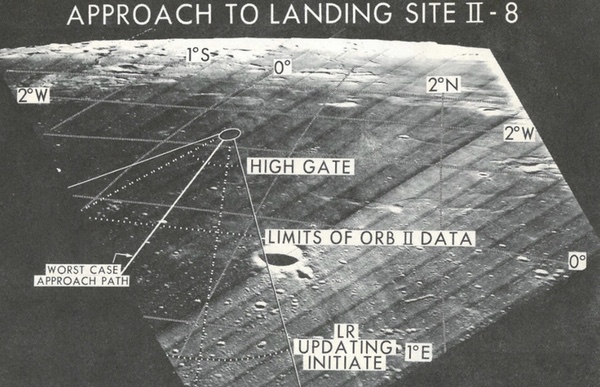
A few notes of interest. Site 4 became the target for the Surveyor 1 lander. Surveyors 2, 4, and 6 were all sent towards Site 1, with only Surveyor 6 succeeding. The area near that location became Apollo candidate site II-P-8 and was photographed by Lunar Orbiter 2. Those images give a good idea of the types of photographs that were to be returned by the LEM Recon mission.
 (credit: NASA) |
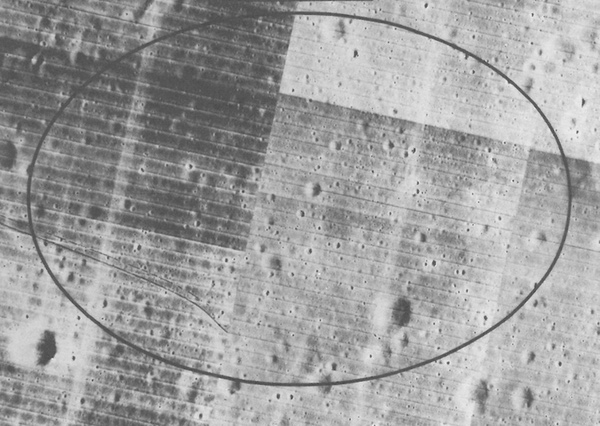
A panoramic camera was part of the Recon LEM’s payload. It would have provided a view similar to that facing a crew as they approached their landing site. This Lunar Orbiter mosaic of Site II-P-8 illustrates how such images from the Recon LEM would have looked.
 (credit: NASA) |
The LEM Recon never flew but NASA did go forward with the LMSS effort for several years. As mentioned, the LMSS utilized a modified Gambit satellite equipped with the classified KH-7 camera. This project, with the classified name of Upward, began in 1964 as a joint project between the NRO and NASA. It progressed to the point where two flight units were being prepped for vacuum tests. In the end, the robots came through and the LMSS was cancelled in July 1967.
| History is now repeating itself as NASA plans for missions to land robot avatars on ice moons such as Europa and Enceladus. |
The Apollo 10 mission resembled, in some small way, that of the Recon LEM. The Lunar Module Snoopy (LM-4) flew low over Site II-P-2 for a couple of orbits at an altitude of nine nautical miles (17 kilometers). Though brief, the orbital maneuvers of LM-4 demonstrated the agility of the craft, a key element of the Recon proposal.
History is now repeating itself as NASA plans for missions to land robot avatars on ice moons such as Europa and Enceladus. We have no idea of the small-scale nature of their surfaces and of the distribution of smooth terrain. High-resolution photo surveys and site certification probes, perhaps carrying beacons, seem to be logical precursors. I reviewed these options in a white paper for the most recent Planetary Decadal Survey, “Europa Exploration Philosophy.”
Sources
- “Grumman Study of LEM for Lunar Orbital Reconnaissance”; September 1963; Grumman Aircraft Engineering Corporation
- “Preliminary Engineering Description of the Survey Camera for the Apollo Mapping and Survey System,” Volume 1; prepared by Eastman Kodak Company, Apparatus and Optical Division for Headquarters Space Systems Division (SAFSP)
- “The Apollo Spacecraft – A Chronology”; NASA SP-4009; Brooks and Ertel; 1973; Volume III; entry for October 23, 1964
Note: we are using a new commenting system, which may require you to create a new account.