Live, it’s the Big Bird! The HEXAGON satellite and near-real-time reconnaissanceby Dwayne A. Day
|

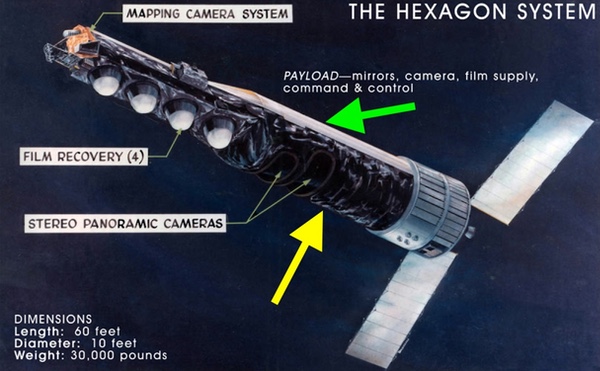 The HEXAGON satellite was the size of a schoolbus. Twenty were launched between 1971 and 1986, with the last one destroyed when its rocket exploded above the pad. If a near-real-time reconnaissance system was incorporated into the satellite, it probably would have installed above the main cameras in the area indicated by the green arrow. The last vehicle was equipped with an infrared camera known as the S-Cubed, which was located in the in a spot indicated by the yellow arrow. The vehicle never reached orbit. (credit: NRO) |
Background of HEXAGON
The HEXAGON program began in the mid-1960s as a replacement for the CORONA area search satellite. The goal of HEXAGON was to photograph large areas of the Soviet Union at resolution sufficient to identify Soviet weapons systems and differentiate them: for instance, identifying a tank versus an armored personnel carrier. HEXAGON was designed and built by the Perkin-Elmer Corporation of Danbury, Connecticut. It was originally planned to launch in 1970, but due to technical problems, it was delayed by a year.
| They were spurred on at least in part by the experience during the Soviet invasion of Czechoslovakia, when Soviet invasion forces were photographed by an American reconnaissance satellite, but the film was not seen until after the invasion had occurred. |
HEXAGON had two powerful cameras that spun in opposite directions, exposing long lengths of film. The film ran from large supply reels at the rear of the spacecraft, through the cameras, and forward into the four reentry vehicles. When a reentry vehicle was full, the film was cut, and the vehicle was sealed and ejected. It reentered Earth’s atmosphere and was recovered. The film was transported to Eastman Kodak in Rochester, New York, where it was developed and copied and sent to Washington, DC for analysis. It could be a few days to several weeks from when a photo was taken to when it was seen. It was not timely, but each HEXAGON mission would cover so much area at such good resolution that it would return a huge amount of intelligence data in a relatively short period of time.
The CORONA, GAMBIT and HEXAGON film-return systems provided “strategic reconnaissance,” meaning assessments of the numbers and types of Soviet weapons systems. They were not intended to provide indications and warning of potential attack. But throughout the 1960s the National Reconnaissance Office (NRO), which managed the satellite intelligence programs, evaluated other potential systems for providing photographic intelligence faster. They were spurred on at least in part by the experience during the Soviet invasion of Czechoslovakia, when Soviet invasion forces were photographed by an American reconnaissance satellite, but the film was not seen until after the invasion had occurred.
By early 1970, there were two concepts being considered for “near-real-time” reconnaissance, which was generally understood to mean that photos would be available for viewing within an hour. These two concepts were the electro-optical imaging (EOI) approach, and the Film Read Out GAMBIT, or FROG.
 A CORONA reconnaissance satellite photo of Prague, Czechoslovakia, taken during the Soviet invasion. The satellite had pre-invasion photos that were not seen on the ground until after the invasion took place. (credit: Harry Stranger) |
Near-real-time for HEXAGON
In late 1970, Perkin-Elmer (P-E) proposed to officials at the NRO to add a near-real-time capability to the HEXAGON satellite. Perkin-Elmer had not yet conducted a detailed study but was proposing that they be authorized and funded to perform one. P-E at the time had no system description for this concept. They only suggested possible techniques and components and had not done a full evaluation of them. The company not only needed authorization and money to conduct a study but also needed better guidance from the government on what such a system should do.
The proposed configuration would have a total lifetime of 135 days. After 45 days of the primary HEXAGON mission at an altitude of 80 nautical miles (148 kilometers), the satellite would then be boosted to 124 nautical miles (230 kilometers) to provide another 90 days of near-real-time operation. Four HEXAGON launches per year lasting 145 days would provide a continuous near-real-time capability in orbit. One satellite would be performing the primary HEXAGON mission while the other would be performing the near-real-time mission.
The satellite would have additional fuel to not only boost it to the higher orbit, but to make up for drag during the extended mission. The mass for that fuel and the near-real-time equipment would be obtained by deleting some of the secondary payloads and subsatellites. HEXAGON was then planned to carry a satellite into orbit mounted to its forward section. That satellite, designed for signals intelligence, would be deployed in orbit and then use its own rocket motor to boost it to a higher orbit. Deleting it and its handling system would save several hundred kilograms. It is not clear what other secondary payloads P-E proposed eliminating, although HEXAGON flew with several different secondary payloads over its 20 missions, all mounted to or deployed from the forward section of the bus-sized satellite.
| An NRO official whose identity is deleted from a declassified document referred to the proposal as “an appealing concept which appears to hold much promise.” |
The near-real-time “module” would be composed of a separate film supply and take-up for the film, a near-real-time film looper, an on-board film developer and scanner, and the data transmission system. The module would have up to 13,000 feet (3,960 meters) of film. The developing and fixing process would require only radiation and heat. The near-real-time film would be spliced on to the end of the primary film at the end of the 45-day primary mission. It would use one of the two cameras, providing only monoscopic imagery, whereas the two cameras enabled stereoscopic imagery of targets that could be used to calculate the height of objects on the ground.
The processed film would be scanned with a laser scanner or a solid-state array with electronic scanning. The scanning signal would be transmitted to a communications satellite and then to a ground station. Perkin-Elmer believed that a single comsat would enable all the film to be transmitted using a video bandwidth of 11.5 megahertz. The company also considered direct transmission to the ground.
The Perkin-Elmer proposal lacked detail, including film characteristics, the film handling and developing procedures and processing time, and the scanning and read-out operations and times. There was no description of the practical operational capability of the proposed system. Perkin-Elmer estimated that the satellite could only transmit for 38 minutes per orbit (six orbits per day), allowing approximately 12 feet (3.7 meters) of film to be transmitted during each pass.
An NRO official whose identity is deleted from a declassified document referred to the proposal as “an appealing concept which appears to hold much promise.” The official believed the subject should be pursued “and an attempt be made to find a more satisfactory mechanization.” He added, “Solid state array scanning is by far the most promising, offering better overall resolution, design simplicity, and operational reliability and flexibility. The data rate using a laser scanner is limited by a scanning rate of about 50,000 lines/minutes. Data rate with solid state arrays is essentially unlimited in this application.”
 The film scanning system from a NASA Lunar Orbiter spacecraft, now at the George Eastman Museum in Rochester, New York. Exposed and developed film was scanned by this device and the dark and light parts of the film were converted to electronic signals that were beamed to Earth and converted back into an image. A similar system might have been used in a proposed near-real-time reconnaissance version of the HEXAGON satellite. (credit: Dwayne Day) |
FROG and KENNEN
The debate over developing a near-real-time satellite reconnaissance capability heated up throughout 1970. Electro-optical imaging (EOI) technology was improving but was still immature. On the other hand, film-readout technology had already been flown in space. FROG would rely upon the proven GAMBIT-3 camera system. Instead of two reentry vehicles to collect the exposed film, FROG would have a large forebody that housed two film supplies and scanning systems. Film would be fed through the camera and exposed, then it would be developed onboard and scanned using a process that Kodak referred to as “bimat” and already proven on NASA’s Lunar Orbiter program. When one film supply ran out, the other system would be used (see “FROG: The Film Read Out GAMBIT program,” The Space Review, February 7, 2022.) A film-scanning system had also been proposed for the Manned Orbiting Laboratory (MOL) program, canceled in summer 1969 (see “Live, from orbit: the Manned Orbiting Laboratory’s top-secret film-readout system,” The Space Review, September 18, 2023.)
Most of the technology required already existed, although it had not been incorporated into a large and complex system like FROG. Presumably, Perkin-Elmer’s proposal for HEXAGON would have been similar to FROG. The developing system probably would have been mounted above and forward of the cameras, although how the different film would be spliced onto the existing film for the primary mission is unclear.
The timing of the HEXAGON near-real-time proposal was not coincidental. The same month that the NRO official brought the concept to the attention of the head of the NRO, there was a discussion within the NRO’s Executive Committee about several possible “crisis response satellites” with names like “CORONA Six-Pack,” “PINTO,” “AXUMITE,” “FASTBACK,” and “SPIN-SCAN.” None of these were accepted. (See “National Reconnaissance Program crisis photography concepts, part 1: A six-pack of Corona”, The Space Review, May 31, 2022; “National Reconnaissance Program crisis photography concepts, part 2: PINTO,” February 6, 2024; “National Reconnaissance Program crisis photography concepts, part 3: Axumite,” The Space Review, June 10, 2024; “National Reconnaissance Program crisis photography concepts, part 4: FASTBACK and FASTBACK-B,” The Space Review, November 25, 2024; “Spinning towards the future: crisis response from space,” The Space Review, July 3, 2023; “Crisis in space: the 1973 Yom Kippur War and ‘crisis reconnaissance,’” The Space Review, October 2, 2023.)
The debate over whether to approve FROG or EOI for development came to a head a few months later in spring 1971 when senior intelligence officials decided to pursue FROG as the near-term solution, able to be fielded within a couple of years, and EOI as a longer-term solution, available around 1976 or 1977. Later in the year, that decision was reversed, FROG was canceled, and the EOI system, soon named the KH-11 KENNEN, was pursued and eventually launched in late 1976.
 In the mid-1970s, the National Reconnaissance Office had a program to study a near-real-time reconnaissance capability for the HEXAGON satellite. It was named “RED SHIRT,” possibly after Star Trek. Pop quiz: Which of these four characters returned safely to the Enterprise? (credit: Paramount) |
RED SHIRT
There is no indication that the NRO approved a study by Perkin-Elmer of adding a near-real-time capability to HEXAGON. It would not have been ideal or what the NRO was seeking by 1971 with FROG and KENNEN. The one advantage it would have had was providing a much broader imaging area than either of those systems.
| Alesi explained that the origin of the S-Cubed was the desire by Perkin-Elmer’s leadership to expand their products. “We were trying to get into the star-tracker business,” he recalled. |
A recently declassified document from 1976 indicates that the subject remained alive in the form of a program named RED SHIRT. RED SHIRT was described as “a near-realtime film readout device” for HEXAGON. It was not considered an option for the block IV HEXAGON satellites, which were scheduled for launch in the late 1970s, but eventually slipped into the 1980s. An internal NRO memo noted that any decision to pursue RED SHIRT should be compatible with launch on the Space Shuttle but would also have to be evaluated against the costs of upgrades to the KENNEN.
The origin of the name RED SHIRT is unknown. However, later a proposed space system was named DAMON, an apparent reference to “Nomad” spelled backwards. Nomad was a spacecraft featured in an episode of Star Trek, and RED SHIRT may have been a reference to the expendable security guards of the TV series.
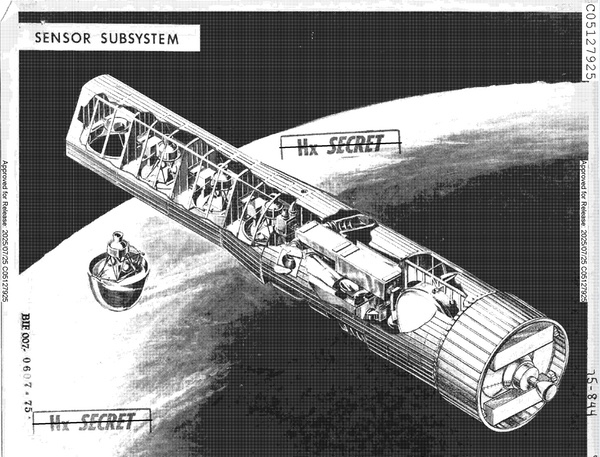  Interior of the HEXAGON reconnaissance satellite showing the two main cameras and the two S-Cubed cameras that faced up and to the rear to take star images for determining the satellite's position. HEXAGON used reentry vehicles to return the film from its main cameras. (credit: NRO) |
HEXAGON launches and the S-Cubed
The first HEXAGON launch took place on June 15, 1971. The mission was successful and was followed by three more in 1972 and again in 1973, two more in 1974 and again in 1975. After that the launch rate dropped to one per year. Starting with the fifth HEXAGON in 1973, a mapping camera was added to its nose along with its own film-return vehicle, and these payloads flew on HEXAGON until the 16th vehicle launched in 1980. The 17th HEXAGON, launched in 1982, eliminated the mapping camera and used the main cameras for mapping purposes, something made possible by a new technology (see “Above Top Secret: the last flight of the Big Bird,” The Space Review, February 18, 2019.)
One of the primary requirements for a mapping camera is to precisely record the position of the terrain in the photographs so that the photos can be stitched together to form large scale maps. One of the things that prevented the HEXAGON’s main cameras from being used for mapping was that the location data for each image was not precise. The satellite had stellar indexing cameras that periodically took photos of stars that could be compared to known star maps to determine the exact pointing of the spacecraft. But these cameras only operated periodically, and during the intervals between stellar index camera fixes, gyro data was used to correct for spacecraft motion relative to the Earth. By the mid-1970s, engineers at Perkin-Elmer Corporation, who had designed the HEXAGON’s powerful dual camera system, came up with a way of providing much more precise data about where the HEXAGON’s main cameras were pointing. They did this by adding a new camera system to the spacecraft known as the Stellar Solid State: the S3 or “S-Cubed” camera.
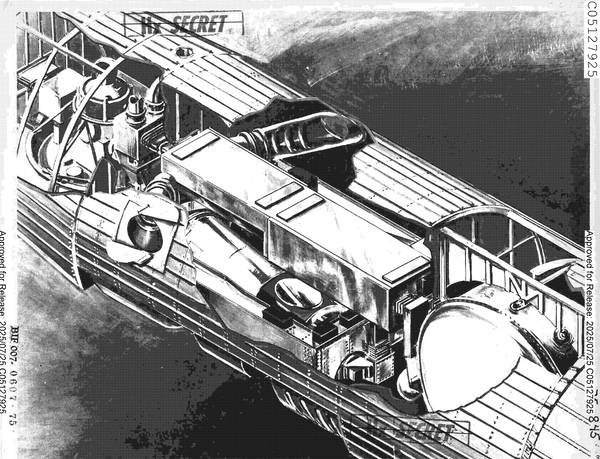
 The two S-Cubed cameras looked upwards while the reconnaissance cameras looked down at the Earth. They improved the position reporting for the system, making it possible to eliminate a dedicated mapping camera and use the main cameras for mapping purposes. (credit: NRO) |
Tom Alesi was an engineer who had been at Perkin-Elmer since the beginning of the HEXAGON program in the mid-1960s. “I started before we even had a building,” he recalled. Throughout the development of the main camera system and then the flights in the 1970s he worked on various projects associated with improving HEXAGON, making it better and doing other tests.
Alesi explained that the origin of the S-Cubed was the desire by Perkin-Elmer’s leadership to expand their products. “We were trying to get into the star-tracker business,” he recalled. They wanted to compete with Ball Aerospace, which was a leader in the business. One of their incentives was that they discovered that the Hubble Space Telescope, which had not been launched yet, had star trackers that used a lot of power, and they wanted to come up with an alternative that was less energy hungry. Once they had developed and flown several of the S-Cubed star trackers by the early 1980s, however, they found that they had a hard time selling them. Customers wanted to know if the star trackers had flight experience, but the HEXAGON missions that had used them were classified.
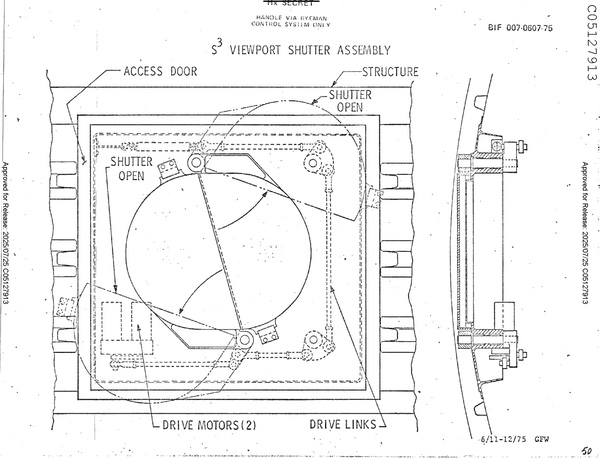 The Viewport Shutter Assembly opened to enable each S-Cubed camera view the sky above the satellite. (credit: NRO) |
The S-Cubed consisted of two cameras that used charge-coupled devices, or CCDs. CCDs turned light directly into electronic impulses. They had been invented about a decade earlier by Bell Laboratories, probably with at least some CIA funding. A CCD array formed the basis of the image capturing sensor inside the KH-11 KENNEN reconnaissance satellites first launched in 1976, and Perkin-Elmer’s engineers had sought to add this technology to the HEXAGON in a supporting role. What the S-Cubed system could do was record continuous stellar fixes, meaning that the spacecraft did not need to rely on the less accurate gyroscope information. That enabled the main cameras to be used for mapping purposes and the extra mapping camera on the spacecraft’s nose was eliminated. Other changes increased the film load and enabled more of the film to be used.
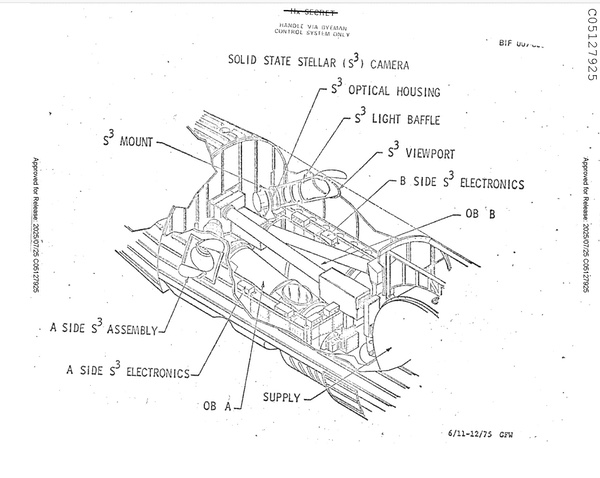
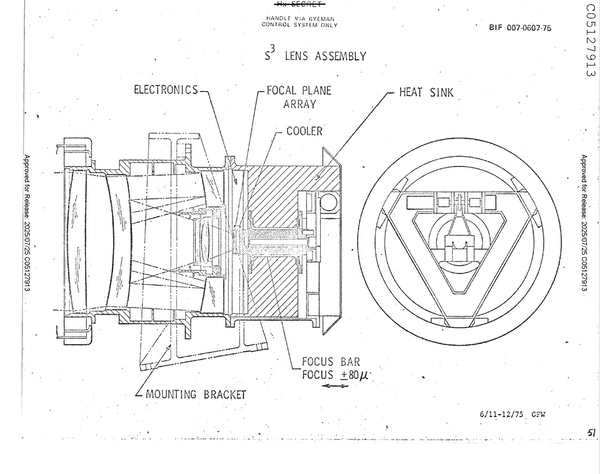 Perkin-Elmer started the Solid State Stellar camera to get into the business of making stellar cameras. Because the HEXAGON missions were classified, the company had difficulty marketing them. (credit: NRO) |
A former NRO official explained how the S-Cubed cameras worked: “The two normal S3 cameras were mounted on the port and starboard sides on the front of the Two Camera Assembly (TCA) behind closeable doors in the mid-section structure and looked up, out, and back of the vehicle to capture star transits across the CCD linear arrays as the vehicle moved through its orbit. The data was recorded on the vehicle telemetry tape recorders for playback to the ground and subsequent star centroid processing.” The cameras were mounted directly to the frame that also held the HEXAGON’s two main cameras, which meant that their angular relationship to those cameras was precisely known.
According to Meeting the Challenge, a book by Phil Pressel, one of the designers of the HEXAGON’s main camera system, the electronics for the cameras provided processing, storage, and transmission of the star data. There was also a thermal and power control box to provide the command interface, power to the focal plane electronics, and to control coolers in the two S-Cubed cameras.
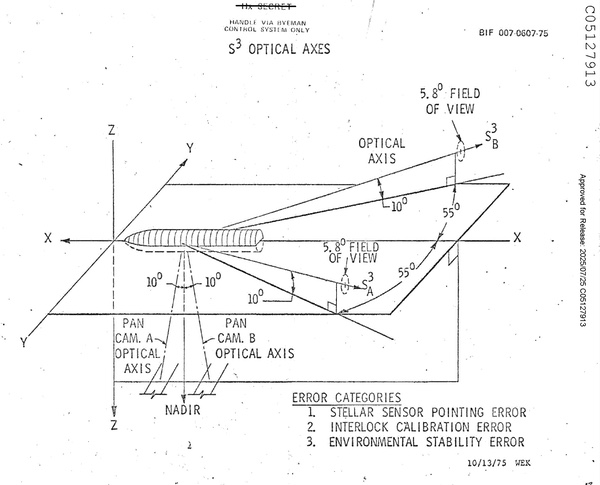 The two S-Cubed satellites looked up and aft of the satellite. For HEXAGON missions 18 and 19, the satellite was flipped and rotated to enable one of the cameras to view the ground below, looking for heat sources at night. For vehicle 20, a spare camera was mounted facing down so the spacecraft did not have to change its orientation. The plan was to fly the satellite much longer than a regular HEXAGON mission to use this special camera to provide imagery of the Soviet Union at night. (credit: NRO) |
The 17th HEXAGON mission, designated 1217, carried the S-Cubed camera system into space in 1982 and it worked properly. On mission 1218, launched in 1983, the satellite controllers decided to do something new. The former NRO official explains: “The CCDs also had a limited infrared (IR) capability, which on earlier vehicles were used to run experiments at the end of the normal mission to take views of the ground on north-bound local night time passes, with the vehicle flipped over on its back and rolled to one side to search for large IR signatures that might indicate activity. During northbound (night) portions of the orbit, the IR activity signature would have greater contrast with a cool earth background than during the daylight passes with a hot earth backdrop.”
Because the stellar cameras looked at the stars, pointing one of them at the ground was a substantial maneuver, flipping the bus-sized spacecraft head over tail in orbit. This used some of the reaction control system (RCS) gas. Because there was a risk that the spacecraft could get stuck in this position with its main cameras pointed out toward space, controllers only performed this pirouette at the end of the mission.
The 19th HEXAGON spacecraft, launched in 1984, also carried an S-Cubed camera system, and it too was successful during the tests. Unfortunately, that spacecraft experienced control problems that caused the ground controllers to cut the mission short. They loaded up all the film into the first three reentry vehicles and brought them down more quickly than usual out of concern that the spacecraft might die in orbit with film still aboard.
Just what exactly those S-Cubed sensors saw on missions 18 and 19 while flying over the Soviet Union at nighttime remains classified. “They knew the Russians were doing stuff at night that we couldn’t see,” Alesi explained. Intelligence officials had long been concerned about Soviet “denial and deception” efforts where they sought to hide activities, sometimes by conducting them at night.
  In April 1986, the last HEXAGON satellite was launched at Vandenberg Air Force Base in California. Its Titan rocket exploded above the pad, raining debris on the surrounding area, including the classified satellite and the special S-Cubed camera installed on the vehicle. Although most of the debris was recovered, some pieces of the Titan still remain in the surrounding area. |
The last flight of the HEXAGON
The successful tests with the new camera capable of detecting infrared sources inside the Soviet Union prompted the NRO to add a new mission to the last HEXAGON flight: operating the satellite as an infrared detection platform. According to the former NRO official “there was some success with the experiments, so on vehicle 20, the spare S3 camera was added and mounted pointing down so that you wouldn't have to flip and roll the vehicle from south- to north-bound passes and back again every 45 minutes wasting precious RCS gas,” he explained. “It also allowed you to do this night time IR mission during the main mission rather than having to wait until the end of the main mission which had been done on the test on the previous vehicle.”
| Because of this new sensor, the last HEXAGON mission now had the ability not only to conduct infrared observations during its primary mission, but also to keep operating long after its primary mission was completed. |
Tom Alesi was put in charge of adding the additional S-Cubed camera to the spacecraft. There was no special designation for the project, no special program number. In fact, Alesi said that at Perkin-Elmer they only referred to the HEXAGON project as “Program 1” or “P1.” “HEXAGON or KH-9, that was a no-no,” he remembered. “It was always P-1.” They even used shorthand for all the components. The film platen, which held the film flat for exposure to light, was called “the PL” and the device that looped the film was called “the LO.” They reached a point where they had a hard time remembering the actual names for the parts of the camera system. Phil Pressel remembered that nobody at Perkin-Elmer ever mentioned the name of the customer—initially the CIA and later the US Air Force component of the National Reconnaissance Office. They were always referred to as “the customer.” All of this in the name of secrecy.
Alesi had to figure out the engineering for the special S-Cubed camera system. “It was mounted in the area between the film supply and the Two Camera Assembly,” he recalled. They cut a hole in the spacecraft so that the camera could look down at the Earth. They hired Schwartz Industries to produce a frame for holding the camera, milling it out of a large piece of aluminum about one meter square. Alesi remembered that each time he submitted his design the orders came back to make it stronger, so the frame got thicker and thicker.
Because of this new sensor, the last HEXAGON mission now had the ability not only to conduct infrared observations during its primary mission, but also to keep operating long after its primary mission was completed. It could orbit the Earth, taking infrared images of the Soviet Union until it ran low on reaction control thruster fuel. According to a mission report, the primary mission involving the main cameras was scheduled to last 300 days, longer than any previous HEXAGON mission. But then the spacecraft would continue to orbit on a “solo” mission for an additional 240 days, operating its infrared S-Cubed camera—a year and a half in orbit, twice as long as the longest HEXAGON mission.
The NRO was increasingly interested in infrared observations of the Soviet Union during the 1980s, and at some point, a new infrared observing capability named DRAGON was added to the KH-11 satellites. According to a former CIA analyst who was aware of DRAGON, it was a substantive improvement to the KENNEN, and almost certainly far more capable than the S-Cubed camera because it saw further into the infrared, meaning that DRAGON could see cooler infrared targets.
There was a lot riding on this last HEXAGON launch. “They crammed all they could on Vehicle 20 since it was the last and they knew there were some collection requirements and subsat missions that wouldn't see any new data or opportunities for a long time, if ever,” the former NRO official explained.
On April 20, 1986, the Titan 34D rocket carrying the last HEXAGON rose above the launch pad and then blew itself to smithereens, raining debris down on the pad and surrounding area, starting small brush fires and damaging buildings and some vehicles parked near the pad. It was a devastating end to a program that many people had spent their entire careers working on.
An investigation revealed that some insulation inside one of the rocket’s solid boosters had come loose, allowing exhaust gases to escape and burn through the casing, leading to a rapid explosion. After Alesi went back to Perkin-Elmer’s facility in Danbury, Connecticut, he later talked to somebody involved in the laborious process of cleaning up the classified debris. That person told him that they found the sturdy aluminum frame that held the additional S-Cubed camera. It was still intact: clearly more than strong enough.
Notes
[Name deleted] Memorandum for Dr. McLucas, “HEXAGON Near-Real-Time Readout,” January 21, 1971.
Note: we are now moderating comments. There will be a delay in posting comments and no guarantee that all submitted comments will be posted.