A square peg in a cone-shaped hole: The Samos E-5 recoverable satellite (part 2)by Dwayne Day
|
| Within a small group of reconnaissance experts, Levison was highly regarded. |
In contrast, Jack Herther was one of the unsung pioneers of the early space age. He was a young engineer who had obtained a master’s degree at the Massachusetts Institute of Technology (MIT) in 1955 and written what was probably the first academic thesis about satellite ascent guidance and stabilization. His thesis was classified and was not declassified until 1967. After MIT, he served as an Air Force officer in the WS-117L satellite program office, where he worked on guidance and control and on-orbit stabilization systems for the fledgling reconnaissance satellite. Herther had left the Air Force soon after Sputnik, disgusted at the lack of progress on WS-117L. He was the first outsider hired by the newly-created Itek Corporation in late 1957, where he quickly went to work designing a navigation system for post-mission geolocation of unmanned reconnaissance balloons flying over the Soviet Union. The system was intended to enable photo-interpreters to determine the location of the free floating balloon when it took its photographs.
Herther suspected that he had been hired by Itek founder Richard Leghorn specifically because Leghorn realized—or, more likely, had been told by White House intelligence advisor and Polaroid president Edwin “Din” Land—that stabilization problems were a key part of adapting Levison’s HYAC balloon camera to space use. The company therefore needed a guidance and control expert and Herther fit the bill. While at Itek, Herther was responsible for conceiving and proposing the concept of what Leghorn called the “stable table,” the first practical form of three-axis spacecraft stabilization that is today used in most spacecraft. The earlier concept that Herther had worked on as an Air Force officer for the higher altitude E-1 and E-2 satellites involved using the Earth’s gravity gradient to stabilize the satellite by pointing it nose down, essentially a passive system.
Today, most three-axis stabilized satellites use momentum wheels to keep them pointed in a particular direction. But in early 1958, Herther proved that at low altitudes, active, multi-day three-axis on-orbit stabilization was possible. They could fly the Agena upper stage horizontal to take advantage of its aerodynamic shape, enabling it to fly at lower altitudes where the air was thicker, and use its existing ascent guidance and control equipment with only minor additions. In his 1955 master’s thesis, Herther had determined that a launch vehicle’s inertial measurement system’s gyroscopes would drift during the powered flight to orbit and therefore needed to be augmented with horizon sensors that told the guidance system what direction was up and down. The Agena therefore had horizon sensors as a direct result of his MIT research. The Agena’s rocket engine gimbaled to control pitch and yaw during thrusting, and a cold gas jet system was used to control roll, all taking directions from this guidance system.
In early 1958, Herther determined that by adding cold gas pitch and yaw jets in addition to the existing roll jets, increasing the nitrogen gas supply, and using the existing horizon sensors, the Agena could stabilize itself in orbit, not simply in the boost phase. The system would damp out any vibrations or oscillations of the vehicle, creating an active stabilization system verses the passive one that the Air Force was already developing. The Agena could achieve sufficiently low pointing errors and low angular blur rates (i.e. the blurring of the image in the camera) that the CORONA satellite could meet its resolution requirements without using up all its nitrogen control gas on short, one-day missions.
Herther proved to CIA and other intelligence officials that the Agena could therefore serve as the equivalent of a tripod for a camera system. “At that time everyone thought this was high risk,” Herther explained, “but if the ascent system didn’t work, you weren’t in orbit anyway, so I considered it lower risk than using gravity gradient stabilization.” Any motions imparted to the spacecraft by its internal equipment, such as the moving camera, could be automatically sensed and dampened out with the gas jets. The vehicle would move so little that there would be minimal blurring of the images. Once the project was approved and Itek got the contract, Herther worked on CORONA throughout 1958.
But Herther was still worried about the inertial forces that the moving camera parts and the film supply spools would impose on the spacecraft. “So the first thing I did was order a Pace Analog Computer,” Herther said. “Fifty thousand bucks on CIA’s black budget. I just ordered it. And I hired two engineers and a technician to run that damn thing. And we set up a very elaborate analog simulation of the Agena vehicle and our reaction to it at full and empty film spool conditions in order to verify that extremely small rates did not cause image smear during exposure.” The CORONA had a lens that oscillated back and forth inside the spacecraft. What he discovered by running the simulation was that their first CORONA design created more movement of the spacecraft than the active gas stabilization system could cope with. “We had to whack down the inertia of the reciprocating scan arm,” he explained. They added several systems to reduce the effects of the various moving parts of the camera. It was a lesson that Herther took with him after CORONA.
In response to Lockheed’s March 1959 request for a new recoverable high-resolution reconnaissance camera, Herther and Levison initially proposed an ambitious camera design that dramatically improved upon the existing CORONA camera in resolution and other features. They thought that they could just barely squeeze it inside the man-sized space capsule that Lockheed was building.
The CORONA camera that Itek had been designing throughout 1958 had a single 24-inch (61-centimeter) focal length panoramic camera that rocked back and forth, exposing a long strip of film. It was small and lightweight in order to fit atop a converted Thor ballistic missile that barely pushed it into space. The camera would scan a single piece of film and then rotate back as the next piece of film slid into place. It was a clever design, but limited by the severe weight constraints imposed by the booster. One major drawback to the design was the use of a single camera, which allowed only one image to be taken of the target at a time. Reconnaissance experts preferred stereo imagery. Two images of the same object, each taken at a slightly different angle, allowed a specialist known as a photo-grammatist to make precise measurements of the size of the object. The best way to achieve stereo imagery was with two cameras, each set at an angle to each other.
CORONA was a barebones design crammed into a small space and two cameras would have weighed too much. However, the new recoverable spacecraft that Lockheed was going to build used a more powerful Atlas booster and was over a foot (30 centimeters) larger in diameter than the CORONA, with much more internal volume.
“We thought we could cram two 48-inch f/5s in that diameter,” Herther said, decades later, referring to the focal length and focal ratio of the cameras he and Levison wanted to fit into the capsule. They could thus develop the ultimate outgrowth of the CORONA camera, providing both higher-resolution and stereo imagery simultaneously. The cameras would be mounted at an angle pointing out of the horizontal spacecraft’s side, down at the Earth. They would face slightly in toward each other in a V-shape so that they imaged the same object at different angles. The spacecraft would fly horizontally in relation to the Earth with its nose pointing in the direction of flight. Camera ports in the side of the capsule would allow the cameras to look outside the vehicle. Levison and Herther took their design to Lockheed. “And they said no no no no no…” Herther remembered, “we’re going to bring the whole camera back and you don’t have that much weight to get those two in.”
Therein lie the big difference between designing the CORONA camera and the new reconnaissance camera. With CORONA, the camera was separate from the reentry vehicle. It therefore did not have to meet any of the constraints of the reentry vehicle, only the constraints of the diameter of the spacecraft fairing and the lifting capability of the Thor-Agena rocket combination. Herther and Levison quickly learned that although bigger and possessing greater weight capability, this new Sentry spacecraft had additional design constraints.
In April 1959 Lockheed proposed three different spacecraft configurations to the Air Force, one of which placed the camera outside of the reentry vehicle. But at some point during the summer of 1959 the company decided—possibly at the direction of the Air Force—to choose the biggest of the three capsule proposals and to return the entire camera inside of it. This capsule had a diameter of 72.25 inches (183.5 centimeters). This was only 2.25 inches (5.72 centimeters) less than NASA’s manned Mercury spacecraft. Unlike the manned spacecraft that Lockheed pitched to the Air Force in 1958, it would not be so cramped if the Air Force decided to actually put an astronaut inside of it. Lockheed also decided, for reasons still unconfirmed, but probably having to do with company and Air Force desire for a manned spacecraft, that the E-5 vehicle would be pressurized to half an atmosphere with nitrogen gas. Levison and Herther had to meet a number of requirements that were a result of Lockheed’s capsule design, including the pressurization, weight, and center of gravity constraints.
| With the addition of the E-5, Samos now consisted of eight different payload-spacecraft combinations. This proliferation of intelligence satellites started to make certain Pentagon officials uneasy. |
Over the next several months Levison and Herther went back to the drawing board several times, continuously negotiating with Lockheed over the camera design, trying to fit a high-resolution camera into the weight and volume and other constraints imposed upon them by the recoverable capsule. The problem was complex. Although the capsule provided far more room and a greater weight budget than they had for the relatively small CORONA camera, it presented different design constraints. For instance, because the entire capsule had to return to Earth and could not be thrown away in orbit, the camera had to be lighter than they had originally thought—they could not simply take advantage of the full lifting capability of the powerful Atlas-Agena rocket combination. In addition, they could not take advantage of the full volume of the large capsule, because the heaviest parts of the camera had to be located near the reentry shield so that the vehicle would reenter properly and not tumble. In fact, as they proceeded with their design, they discovered that heavy parts of the camera that were located up near the nose of the vehicle either had to be discarded in orbit or redesigned. It was like trying to stuff a square peg into a cone-shaped hole.
In early June Itek officials met with Lockheed representatives to discuss what had been designated the Sentry E-5 “high resolution visual reconnaissance” system. Only a few weeks later, the Advanced Research Projects Agency (ARPA), which had overall authority for military space projects, cancelled the E-5 program. For the next several months it remained in limbo. During this time, those working on the project went back to other tasks. On September 5, after a bureaucratic fight within the Pentagon, Itek was given permission to restart its work on the camera. Soon after, Lockheed was told to proceed with work on the spacecraft. It was around this same time that the Sentry program was renamed Samos. Samos consisted of the E-1 and E-2 film readout satellites, with 100-foot and 20-foot resolution respectively (30.5 and 6.1 meters). It also consisted of a proposed readout system known as the E-3 and several electronic intelligence payloads designated F-1, F-2, F-3, and F-4. With the addition of the E-5, Samos now consisted of eight different payload-spacecraft combinations, plus the stagnant Samos E-3 and a mapping camera, known as E-4, that was officially canceled but was proceeding secretly, without the approval of Department of Defense officials, as a research and development effort. This proliferation of intelligence satellites started to make certain Pentagon officials uneasy.
By November 1959 the first launch of the Samos E-5 recoverable satellite was scheduled for June 1961 at the earliest. On November 17 the Secretary of Defense transferred full management control of the Samos program from ARPA to the Air Force, removing a major impediment to more rapid progress on the E-5. But what Air Force officials were soon to learn was that the Department of Defense’s Directorate of Defense Research and Engineering (DDR&E) was stepping in to take ARPA’s place. DDR&E soon told the Air Force to produce a new development plan that would “emphasize physical recovery and provide for initial launch of recoverable payloads well in advance of the current schedule”—in other words, speed up the Samos E-5.
In December 1959, Air Force Ballistic Missile Division in Los Angeles, which managed the Air Force satellite program, and Lockheed Missiles and Space Division, in Sunnyvale, south of San Francisco, developed a termination agreement that eliminated some of their advanced projects, including the E-3 camera and the Samos F-4 ferret. Also deleted were high-energy batteries, a solar power system, a nuclear auxiliary power system, orbit adjust systems for the Agena, and an Advanced Photographic Readout project, which was supposed to lead to an “Advanced E-2” with a much larger camera and the same ground resolution as the Samos E-5. One other project that BMD canceled was the development of auxiliary retro-rockets for the E-5 capsule. The E-5 spacecraft would have to rely entirely on the Agena’s Bell 8048 engine to brake it out of orbit. The Agena could be used to de-orbit the spacecraft because Lockheed was planning on building an upgraded version of the Agena A known as the Agena B and capable of being restarted in orbit.
Because only a limited number of documents on the Samos E-5 spacecraft have been released, and official histories have neglected the E-5, it is unclear when many key design decisions were made. The original proposal was to carry 500 pounds (225 kilograms) of film. This amount was cut in half. But at what point the retro-rockets were eliminated remains a major question, for they bore a direct impact on Itek’s camera configuration.
Lockheed’s original Sentry Man In Space manned recoverable capsule proposals of April and August 1958 had included solid propellant retro-rockets at the base of the Agena. But Lockheed’s recoverable reconnaissance spacecraft proposals in April 1959 placed the retro-rockets on an unusual telescoping boom at the top of the capsule. At some point this boom approach was ruled out, but it is unclear if this happened early in the design stage or relatively late in the process, or if the telescopic boom was the “auxiliary retro-rockets” system eliminated in December 1959. There may even have been another retro-rocket system in the interim and that was the system eliminated in December. What is clear is that the telescoping boom at the front of the spacecraft was incompatible with Itek’s eventual camera design, so it must have been eliminated at some point before Levison and Herther settled on their camera configuration.
Clever compromises
After repeated revisions, Walt Levison and Jack Herther developed a camera design that would fit the weight and volume constraints of the recoverable capsule. They eliminated one of the cameras in their proposal and dramatically scaled up the optics of the existing CORONA camera from 24 to 66 inches (61 to 168 centimeters) focal length, to meet the requirements of five-foot (1.5-meter) ground resolution from a 200-nautical-mile (370-kilometer) orbit—higher than planned for CORONA. This single camera rotated 22 degrees back and forth around its nodal point (compared to 70 degrees for CORONA), sweeping the image across a strip of film, creating a long thin image. This was known as a panoramic camera and it was the same approach used on the CORONA. It enabled a camera to produce a high quality image over a broad swath of territory.
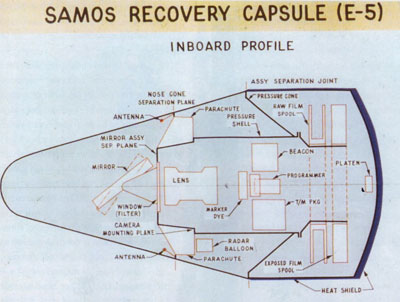
But even though they had eliminated one of the cameras, they developed a clever means of achieving stereo imagery with a single camera. The spacecraft would fly along in its orbit nose first. Instead of two cameras pointing out the side of the spacecraft down at the Earth at different angles, a single large lens tube would point toward its nose, through an optically clear window, at an image reflecting mirror mounted externally outside the reentry vehicle and pointing down toward the Earth, like a periscope. The camera could do this because there was no longer a telescoping retro-rocket package mounted in the way.
| Herther felt that the difficulties the Itek team experienced with the mirror were ultimately highly beneficial for the company. |
“The mirror sits there, looking down for a straight shot,” Herther explained in the dining room of his home, over four decades later. “When you make a stereo pair of photos, it does this and that,” Herther demonstrated, tilting his hand to show how the mirror turned from one angle to another. This mirror would reflect the ground below as the spacecraft flew along horizontally, and could be rotated to a second position, so that it reflected the ground at a different angle. As the spacecraft flew over a target, the camera could take several images of the target—called a “burst” of eight frames—with the mirror at 15 degrees fore of vertical. Then, once the spacecraft flew past the target, the mirror could be rotated and the camera would take another burst of eight frames of the same target now behind the spacecraft at an angle of 15 degrees aft of vertical. One drawback of this design was that while the camera was taking its second burst at a different angle, more targets might pass by unphotographed, and the satellite’s photographic pass over the Soviet Union would therefore have gaps in it. Another drawback was that even from its 200-nautical-mile orbit, the camera would photograph a relatively narrow swath of ground, 60 nautical miles (111 kilometers) wide, which meant that it would not cover much overall territory in each pass over the Soviet Union. But Lockheed’s engineers also designed the spacecraft to be capable of rolling up to 30 degrees to either side in 15 degree increments, enabling the camera to look to either side of the ground track. It could thus take slightly oblique images and cover a little more area, with an effective viewing width of 82 degrees, although each swath would only cover 22 degrees.
In addition to the operational limitations of this camera configuration, the engineering and manufacturing problems were also challenging. The mirror was kidney-shaped, made out of quartz, and very heavy. It would be protected during launch under a nose fairing, and had to be jettisoned at the end of the mission to improve the reentry center of gravity—another of the compromises forced on Herther and Levison by the capsule design. Simply holding the mirror in place at the front of the spacecraft proved to be a real headache for the Itek design team. Mounting the mirror tended to squeeze it around the edges, which subtly altered its shape. “If you hold it and you get a little spherical curvature in it, it ruins the image, big time,” Herther explained. “It goes into astigmatism.” The surface of the mirror would no longer be perfectly flat and so not all of the light rays would reach the film at the same angle, thus blurring the image. “Our flat, 45-degree mirror in front of a camera is something you don’t want to do if you can help it. The idea of looking straight down is the way to go. It really is,” he added. But the mirror was the only way to incorporate the stereo capability into a single lens assembly.
Herther felt that the difficulties the Itek team experienced with the mirror were ultimately highly beneficial for the company. The 66-inch focal length camera on the E-5 was near the limit of practical reconnaissance systems using conventional refractive optics. In order to develop more powerful cameras, Itek would have to switch to mirror-based systems, with which it had little experience. The E-5 mirror proved to be great practice for the later reconnaissance systems that the company would develop.
The interior of the spacecraft was to be pressurized with nitrogen at half an atmosphere, and regulated for temperature and humidity. This was not a reconnaissance requirement and the camera designers had no say in its establishment. The pressurized capsule would maintain a temperature of approximately 70 degrees Fahrenheit (21 degrees Celsius) and a relative humidity of approximately 50 percent. Pressurizing the spacecraft in some ways made the mechanical design of the camera simpler, since its moving parts did not need to operate in a vacuum and thermal control was easier. But it was not necessary for the camera and indeed Itek had designed the CORONA camera to operate in vacuum. Furthermore, the pressurization system added weight, requiring a pressure vessel, the environmental systems, and a window for the camera to look out instead of a hole cut in the side of the vehicle. Ideally, all of this weight could have been better used carrying more film.
Although the mirror was located outside the pressurized capsule, the camera was inside and would have to look through an optically pure window. The camera lens tube would scan back and forth across a film platen, exposing a strip of film that was shorter and wider than that used for CORONA. The platen was located inside the film supply and take-up reel diameters, with the platen closer to the heat shield. The film reels were actually open circles, so that the image was projected through their centers, onto the platen behind them.
There was one advantage to having a pressurized capsule for the camera, however. Itek’s designers put a vacuum pump in to evacuate the air behind the platen. The platen was the slightly curved surface upon which the film rested when it was exposed. In order to take the best pictures, the film has to be perfectly flush against the platen. On the E-5, they designed a perforated platen. “There was a bunch of little holes,” Herther explained. “When fresh film came in, the vacuum would suck it down and hold it really flat. One of the problems with the CORONAs was that the way that scanning went sometimes you would get a little ripple in the film as you go by it.” That sometimes messed up the photograph. This did not happen with the platen on the E-5. “On E-5 that was the one advantage we had.” But it was a lucky result of a decision that had been imposed upon the camera designers, not a choice that Itek had made from the start.
The lenses were held in a big tube called a lens assembly, or “stovepipe” because that is what it reminded people of, and located near the upper part of the capsule, behind the quartz window that held in the atmosphere. The lenses were big. The focal ratio of a camera is the focal length divided by the diameter of the aperture, the opening where light enters the camera. The bigger the aperture, the more light enters the camera. The 66-inch focal length E-5 was an f/5 camera, or 66 inches divided by 5, meaning an aperture 13.2 inches (33.5 centimeters) in diameter. This was a large diameter lens and because of this and their necessary very high quality (the purity and quality requirements of lenses increases directly with their size), the Itek team had to special-order the glass. “When we first got the job it was a long-lead item,” Herther explained, meaning that the lens took longer than most other camera components to manufacture and therefore had to be started earlier. “The Lockheed program manager, Carl Warfolk; Bill Brouwer, our lens designer; and myself went over to Schott, Mainz, Germany, and ordered the glass.” Schott was then the foremost manufacturer of optical glass in the world. “We picked and negotiated the size and the purity and the index. And the lens designer was right there to shift around the design a little bit,” Herther remembered. “And so we ordered lots of glass for N-units, and they had to fork over the money right then, because it was a special order. This was within a month or so after going ahead. So we ordered enough glass for a bunch of them.”
The E-5 camera was in many ways more sophisticated than the CORONA camera upon which it was based. With its longer focal length it was bigger than CORONA. It also used larger film. Compared to CORONA’s 70mm film, the E-5 used five-inch (127 mm film), of which the image size was 4.5 inches (114 mm). It undoubtedly included data in the edges of the film frames, recorded by use of small light displays. This data, or “titling,” would have included machine-readable digital information on the film such as the orbital pass number, the frame number, the roll position of the spacecraft during camera operation (i.e. if the spacecraft was rotated 15–30 degrees to the left or right), the date, and so on. The camera also had some features not yet incorporated into the CORONA.
| “We called it the Mendelson Mod, because in the morning we went to Mendelson’s Hardware Store in Waltham and bought some sprockets and snow blower chains and torque motors to essentially take the lead screws and drive the lens assembly all the way forward, up to the forward end as the body is recovered,” (Herther said. |
Dick Sementelli, a young technician who worked on the E-5 at the time, remembered that the E-5 was far more complicated than the CORONA from an electrical point of view. “CORONA was run by a single motor—a magnetic amplifier servo—that turned a shaft with several pulleys attached to it. The pulleys turned timing belts that provided drive and synchronization to the continuously rotating lens, the oscillating ‘stovepipe’ [lens assembly] and the film metering roller. The film spools were controlled by simple torque motors. The capping shutter was a simple over-center mechanical device.” It was like a flour mill where all the machines were run off a central source. There was a reason for the electrical simplicity, Sementelli added: “CORONA was designed by mechanical engineers,” not electrical engineers.
“E-5, on the other hand, had seven separate servo-controlled systems,” he remembered. “To control the motors, there were probably on the order of 20–28 large power transistors, which I believe were germanium and were very new at the time. The transistors were continually popping due to overheating. I was working as a technician at the time and it seemed that I spent half my time changing power transistors.”
E-5 was more complex in other ways. The spacecraft would be constantly moving as it took its photographs. As a result, the image projected onto the film would also move and would smear unless it was corrected. The Itek team therefore incorporated an Image Motion Compensation (or IMC) system that moved the lens assembly up slightly as the lens assembly rotated around its axis, thereby keeping the image centered on the film. The first CORONA camera had a fixed IMC system, meaning that it would only work if the satellite was in a specific orbit. If the rocket placed the satellite in a higher or lower orbit—as happened frequently during the early missions when the Thor was struggling to achieve any orbit at all—then the pictures would not be as sharp. The second CORONA camera model had a variable IMC that could be crudely adjusted according to the orbit that was actually achieved. The Samos E-5 camera had an even more sophisticated IMC system dictated by the fact that as the camera rolled to either side to take oblique shots, this would affect the speed at which the ground appeared to be traveling when viewed through the camera lens, just as distant terrain appears to move less rapidly than objects closer up when viewed out of the side of a moving car. The E-5’s IMC system could compensate for this.
The E-5 also had variable exposure control so that the film exposure could be adjusted to account for the time of day or year that the photograph was taken. For instance, light levels in Russia were lower during winter than summer and so images taken in winter would be dark unless the exposure time could be adjusted. The exposure control was achieved by use of a focal plane shutter that moved right above the film at the camera’s focal point. Since the lens swept the target area during the photographing process, the camera slit had to sweep the film at the same rate. The shutter was slaved to the lens scan angle by means of a servo drive. Two thin steel sheets sat on top of each other on moving rollers that held them above the film. Each sheet had a rectangular cutout portion and by moving the two sheets relative to each other, the width of the slit exposing the film could be varied to provide ten different exposure times between 1/70 and 1/700 of a second. According to Herther, the exposure time was set on the ground, before launch. When the shutter slid back after each exposure, it closed automatically so as not to accidentally expose the film moving into the camera for the next shot.
At some point after they had established the basic overall design of the camera, probably in early 1960, Itek’s designers were forced to make an additional modification to the camera design that was also dictated by the reentry mode. As Lockheed’s engineers got more information from Itek on the design of the camera and how its mass was distributed throughout the spacecraft, they determined that the lens assembly’s location moved the spacecraft center of gravity too far from the heat shield. If the center of gravity was too high, the vehicle would not reenter properly and would tumble and burn up. They told Herther to redesign it so that at the end of the mission the lens assembly could be pulled down farther into the capsule, toward the heat shield, and thus lower the center of gravity during reentry.
Itek was located just outside of Boston, Massachusetts, and Boston got plenty of snow in the wintertime. If someone did not want to shovel several tons of snow out of their driveway each winter, they purchased a gasoline-powered snow blower to make their lives easier and Herther and his colleagues took advantage of the tools at hand, such as snow blower parts. “I can remember doing it all night,” Herther explained. “We called it the Mendelson Mod, because in the morning we went to Mendelson’s Hardware Store in Waltham and bought some sprockets and snow blower chains and torque motors to essentially take the lead screws and drive the lens assembly all the way forward, up to the forward end as the body is recovered,” (i.e. near the heat shield) Herther said. “We used to joke about it because we did it so quick,” he added.
Dick Sementelli remembered that in order to test the Mendelson Mod on the ground they had to sit the camera vertically, with the lens assembly pointing up. “This was necessary to prevent the ball screws from being bent, in the one-g environment, from the weight of the lens as it moved from one end to the other,” Sementelli explained.