Humans and robots to the Moon and Mars: a unified and integrated space program strategyby John K. Strickland
|
| So, if we accept the premise of using robots in direct conjunction with humans, how should we best use them? |
Current robotic exploration is vital to and is in direct support of future human exploration. Finding a good site for a Mars base will eventually become a high priority. Exploration can be characterized by the level of directness. Boots on the Martian surface is very direct, while humans inside surface habitats directing robots outside is one step down. Humans in orbital habitats directing those robots is two steps down, and humans on Earth operating and sending commands with a significant time delay (like Curiosity) is three steps down. How indirect robotic exploration is obviously has a lot to do with the amount of time delay for direction and control of the robot in question. Exploration by Mars robots controlled from Earth is excruciatingly slow, due to the long time delay, daily communication gaps, and low bandwidth. By contrast, lunar exploration and construction by tele-operated robots could be much faster, even if done from Earth.
The fact that robots do not need to return to Earth after an expedition or need food, water, and shelter, does make them a lot cheaper to operate. However, we will eventually need drilling equipment for the search for life deep underground on Mars, and having humans there to operate it is a practical solution. Ask a roughneck if a robot could run his drilling rig in an oil field.
So, if we accept the premise of using robots in direct conjunction with humans, how should we best use them? We are not talking here about anthropomorphic movie robots, but machines much more like industrial robots or the Canadarm 2 and Dextre, sometimes larger and with much more advanced software. Such robots would be mobile, on rails, with perhaps two wrists and hands at the end of a long arm. We thus need a new generalized space strategy that includes robots.
In fact, we need an even more generalized space program strategy. The issue regarding the use of robots simply brings the larger strategy into focus. The ongoing arguments over which NASA programs should be funded shows how divided the space community is today. We need to compromise, support each other’s goals, and hang together, or we could lose big-time to mandatory federal programs.
We need a unified and integrated space program that:
Returning to the robot issue, how can robots enhance Martian (or lunar) missions? There are multiple ways. I think the idea of real-time tele-operation of robots and rovers by crew members from orbit is very important. This would allow a very robust Mars mission that could create a surface base and occupy it on the very first Mars mission, assuming that a suitable base site had been located. (Such robust missions do require the use of reusable boosters and spacecraft.)
| We need to compromise, support each other’s goals, and hang together, or we could lose big-time to mandatory federal programs. |
In previous mission plans such as Mars Direct and others derived from it, using exclusively expendable Mars landers, an automatic system was first sent to land on Mars two years before a crew arrives and start producing propellants. This would guarantee that the requisite amount of propellant would be ready for liftoff, but the equipment would be sitting there for an extended period before the crew arrives. There also could be no effective real-time tele-operation of any robots on the surface to set up the equipment. There also would be no way to dig up Mars ice to get hydrogen to make fuel. Instead, you would have to import a lot of liquid hydrogen to the surface. Equipment would then be needed to keep the hydrogen cold until it was used up in the process of making methane. If the cryo-cooler broke down, with no robot to fix it, there would be no methane propellant supply ready on the surface for the crew to use, so they would be unable to land.
A basic rule of operations says that crews can support and protect base equipment, which in turn supports and protects the crew. The same relationship can be true with robots and bases and also vehicles and bases.
Three significant facts that did not exist or were not known 20 years ago now change the planning equation for Mars missions. First, we now know that there is very abundant water ice on Mars, frozen under the surface in many areas, so extensive use of higher energy oxygen-hydrogen propellants is possible. Second, we are now aware of the Mars EDL (Entry, Descent and Landing) problem: the very thin atmosphere slows you down only to about Mach 3, and parachutes for vehicles with crews would be too large to open, so you must finish the landing using rocket power. Finally, we will have large, reusable rocket boosters before any human Mars expedition is mounted, capable of supporting robust, high mass Mars missions.
A new approach that has been discussed since 2010 is to bring the crew and cargo to Mars using a large fleet of independent smaller vehicles, each using aerocapture to enter low Mars orbit in a propellant-efficient manner. I covered this approach in detail in a 2011 document. In current scenarios, the fleet would depart for Mars from a logistics base at L1 or L2, rather from low Earth orbit with its dangerous space debris, as originally shown. Propellant for the Mars expeditions is derived from lunar ice at a polar base and brought to the L1 base.
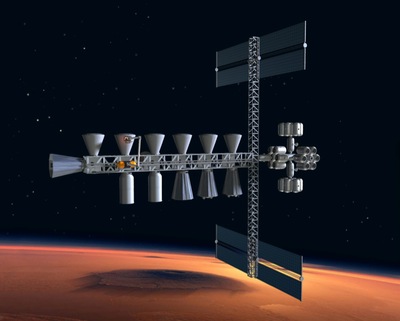
The Mars fleet assembles at a point in low Mars orbit and uses a construction robot on rails to build a logistics base similar to the one at L1 from which they departed from 8–10 months earlier. The robot, similar to the Canadarm 2 but with much greater assembly capacity and dexterity, would assemble a long docking truss to allow all of the cargo vehicles to dock at one end the base, while the pressurized crew habitats and crew vehicles would berth and dock at the other end of the base. The robot would build the 15-meter-wide truss out of a compact package of components, extending its own rails and adding the docking stations as it progresses. The ability to mount high mass expedition architectures makes such a concept practical. The initial mission would use about 3,000 tons of vehicles and equipment, between 600 and 1,800 tons of departure propellant, and would be able to land over 600 tons of actual equipment on the surface.
| While crew members are not hesitant to take risks, the program itself cannot afford to have an accident that could risk program cancellation, so crew safety is paramount. |
Once the low Mars orbit logistics base is ready for use to support landing operations, the robot on rails has another critical function. With its long arm, the robot can reach into the cargo bays of the large cargo carrier vehicles and extract both large equipment, like trucks, habitats, and excavators, and smaller equipment packaged in cargo containers. The robot places them in the cargo bays of the cargo ferries to be taken down to the surface. The rails make it easy for the robot to smoothly move from one vehicle to another during the cargo transfer process.
The logic of this concept now turns back to the use of robots a third time. They can do more than science on the surface. Tele-operated robots, designed to operate in a gravity field, can assist in unloading cargo from the cargo ferries and then assemble base infrastructure on the surface, since the crew is already in orbit. Using excavators, they can also install and bury a shielded crew refuge so that astronauts can then land safely and excavate buried ice deposits. (This same method can also be used on the Moon). They would also set up a propellant production facility, designed as a package plant to be simply unloaded and plugged together, that would then provide propellant from lunar or Mars ice for return flights before any crew members land. Since no crew members would land before the return propellant was ready, there would be no risk to the crew caused by lack of propellant. The larger capacity of the propellant plant would allow over 100 tons of propellant to be produced each month. The crew would be busy supervising the robots until the base was ready. While waiting for the initial batch of more than 95 tons of fuel to be produced, they could also supervise other parts of the base construction. No ferries could take off and return to orbit until there was propellant for them to use.
The base-first philosophy that drives the Access to Mars architecture derives from the stark difference between the risky (no rescue) Apollo sortie missions and the base-first decision for the aborted Vision for Space Exploration (VSE) lunar program that was made in late 2007. (See “The ‘base first’ decision: crew survival and reusability”, The Space Review, January 15, 2007). While crew members are not hesitant to take risks, the program itself cannot afford to have an accident that could risk program cancellation, so crew safety is paramount. A sortie mission to anywhere is risky since there is no immediate means of rescue if the sortie vehicle fails. (With Apollo, of course, there was no possibility of rescue at all if a lunar module had failed.) With the base-first mission design philosophy, a crew does not go to any remote location unless there is either a refuge where they can survive for an extended period or they have an alternate means of rescuing themselves. A Mars base would have a very large supply of food and other consumables, enough for the crew to survive for several years, as well as several of the self-redundant ferry vehicles. If a crew ferry should fail in flight, the five-ton crew cabin would separate and has one ton of propellant to reach safety, either on the ground or by going back into orbit.
Once the crew is on the surface, they will have the robots to assist them in maintaining and operating the base. Crew members could also operate rovers at great distances from the base in real time since the transmission time would be effectively instantaneous. Construction robots could continue to construct the base while it was being used. With further expeditions, equipment could be landed that would allow local materials to be used to expand the base.
| The entire operation, with a unified space program, would also be easier and much less expensive than any of the previously proposed flags-and-footprint missions using expendable vehicles. |
Making useful and reliable structural materials from local materials depends on good technology and a good base location. Finding the proper base site with access to both water ice and useful minerals at the surface is an essential task for robot surveys. Notice how much effort goes into selecting landing sites for the current rovers. Selecting a good base site for a human landing would be even more critical. Cargo ferries would not be sent down to a base site until the presence of the ice and minerals was verified by a robot lander/rover. Additional exploration robots commanded from Earth should thus be designed to spend an increasing amount of their effort in locating good Mars base sites, as well as the search for water and life sustaining conditions and the continuing investigation of Mars geology.
It should be clearly understood that building and operating a real Mars science base, comparable in scope to a current Antarctic science base, is a much more complex enterprise than most people currently understand. However, the entire operation, with a unified space program, would also be easier and much less expensive than any of the previously proposed flags-and-footprint missions using expendable vehicles. Costs would be reduced in four major ways: reusable boosters that lower launch costs; mass production of vehicles, components, and equipment; the use of the cislunar transport and logistics system; and local (Lunar and Mars surface) ISRU production of propellants.
An integrated and unified space program, using humans and robots, using commercial space services to support it and using each major space destination as part of the whole plan, is the best way out of our current goals-driven stalemate.