Dark side of the Moon: the lost Surveyor missionsby Dwayne Day
|

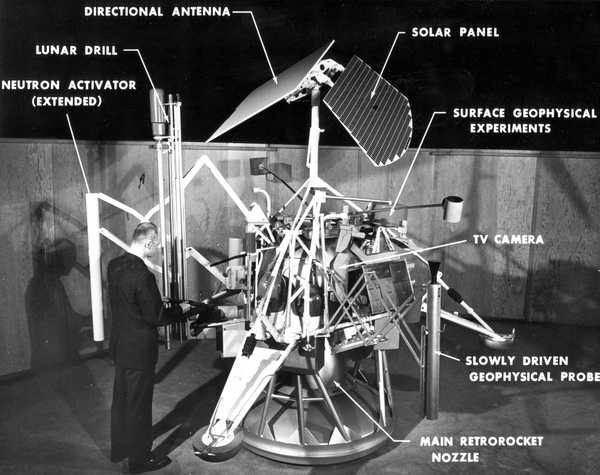 Early mockup of a Surveyor lander equipped with multiple scientific instruments. Many of these instruments were deleted in 1962–63 because of concerns that the Atlas-Centaur rocket could not lift a heavy Surveyor. By 1964, Surveyor was primarily focused on assessing the lunar surface in support of Apollo missions. (credit: NASA) |
Surveyor’s mighty ambitions
Surveyor was originally planned to be the premier NASA lunar science program of the 1960s. Before John F. Kennedy in May 1961 redirected Apollo from a program that might eventually send astronauts around the Moon to a program to land them on the Moon by a deadline, NASA initially envisioned a robotic lunar program named Prospector that would involve a series of lunar orbiters, landers, and rovers. Prospector dissipated around 1961 to be replaced by Surveyor in 1962. When it was initiated, Surveyor was going to include both a lunar orbiter with science instruments and an ambitious lunar lander. The extensive science suite on the early Surveyor concept soon got pared back for various reasons, including the payload limitations of its launch vehicle. But even by 1963, as the Apollo lunar landing program was well underway, Surveyor included both a lander and a science orbiter designated Surveyor B.
| In December 1963, NASA was planning for 17 Surveyor missions to the Moon, designated A thru Q. The first four were primarily engineering missions, the next three were operational missions, and the next ten were undefined. |
However, with Apollo now as the major focus for NASA’s lunar exploration plans, what NASA needed was not science data about the Moon—the Apollo missions would provide that—but general data about the lunar surface that would be useful for landing the Lunar Module on the Moon. That meant good quality photographs of the lunar surface to compare with images taken from orbit, and data characterizing the physical qualities of the lunar surface that an LM would land on. Surveyor’s orbital spacecraft was canceled, replaced by the less ambitious and much more focused Lunar Orbiter program. Lunar Orbiter proved to be highly successful, but it did not provide the orbital science data that the Surveyor orbiter was supposed to produce. The Surveyor lander lost science instruments in favor of instruments for testing the compactness and composition of the lunar regolith.
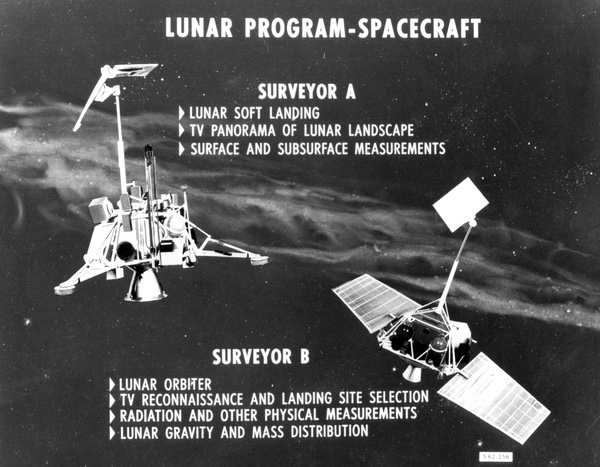 Surveyor started out as the main NASA lunar science program in the early 1960s. The Surveyor B orbiter was canceled in favor of the Lunar Orbiter. (credit: NASA) |
Surveyor was run by the Jet Propulsion Laboratory in Pasadena, California, with Hughes as the prime contractor. When the Surveyor orbiter was canceled and Lunar Orbiter begun, management responsibility for Lunar Orbiter went to NASA’s Langley Research Center in Virginia. As Surveyor entered its intense design phase in 1963, JPL issued study contracts to several aerospace contractors to explore advanced versions of Surveyor.
In December 1963, NASA was planning for 17 Surveyor missions to the Moon, designated A thru Q. The first four were primarily engineering missions, the next three were operational missions, and the next ten were undefined. As an example, the first two Surveyor spacecraft would not carry a surface sampler, which would be added to the third and fourth missions. The three “operational” missions would trade the surface sampler for an alpha scattering instrument. That month, Surveyor program manager Benjamin Milwitsky proposed that the number of Surveyor missions be increased to 29, and that science instruments be added back on Surveyor missions starting in 1967. This would require an upgrade to the Atlas-Centaur rocket. But Milwitsky’s proposals, along with other proposals for expanding NASA’s lunar and planetary science programs, were rejected by the end of the year. The scientists’ ambitions were reigned in, and Surveyor was kept to 17 missions.[2]
The first seven Surveyor missions were designated as Surveyor I vehicles, or sometimes “Block I.” The primary objectives of Surveyor I vehicles were to perform a soft lunar landing and to obtain basic engineering and scientific data regarding the lunar environment and characteristics.[3] Available documentation does not indicate when NASA began referring to “Surveyor II,” but at some point during 1964 it appears that NASA expected that vehicles 8-17 would be of the uprated Surveyor II design. Surveyor II, like Surveyor I, was intended to support Apollo, but provide much more specific data for landing sites. “The primary mission of the Surveyor II spacecraft is to gather sufficient information about the lunar surface to permit the selection and detailed survey of suitable landing areas for the Apollo Lunar Excursion Module (LEM),” a contractor report declared. “Other secondary missions for Surveyor II include Apollo Landing Support, Apollo Logistics, Lunar Exploration, and Expanded Science missions.”[4]
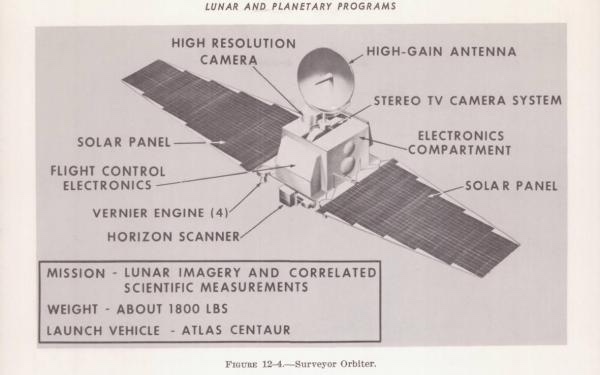 The Surveyor B was intended to conduct lunar science. It was canceled in favor of Lunar Orbiter, a more-focused program that was tasked with obtaining photographs of potential Apollo landing sites. (credit: NASA) |
An Apollo Requirements Document of February 1964 stated a requirement for a small roving vehicle to help “certify” Apollo landing sites. Soon the rover was envisioned for two more possible missions: developing technology for future manned lunar rovers and performing scientific missions on the Moon. The rover would require an upgraded Surveyor lander—it could not be carried on a Surveyor I type spacecraft.
For Surveyor II to provide spacecraft performance consistent with the Apollo landing site survey mission—including carrying the rover—changes were required to the basic Surveyor I design. The weight penalty required to incorporate the performance changes would decrease the payload capability, requiring that the vehicle size be increased to enable carrying even the same payload as Surveyor I. For example, if the injected weight was restricted to Surveyor I’s 1,065 kilograms (2,350 pounds), only 50 to 61 kilograms (110 to 135 pounds) of payload could be carried for a Surveyor II mission. But if the spacecraft weight was increased to 1,225 kilograms (2,700 pounds) injected weight, Surveyor II could carry a 125-kilogram (274-pound) payload.[5] These predictions ultimately proved too optimistic, and Surveyor I’s payload was restricted further than Hughes’ engineers had originally expected.
Surveyor I used the direct ascent mode for reaching the Moon, meaning that it was launched from Earth on an Atlas-Centaur rocket and traveled straight to the Moon’s surface, decelerating on the way down. But this resulted in a limited launch window and restricted the light conditions at landing. In contrast, Surveyor II would use a parking orbit injection mode, increasing the launch window and giving mission designers the ability to choose better lighting conditions for landing.[6] The spaceframe structure was simply scaled up and expanded slightly at the base but was not fundamentally changed. Surveyor II still had the tripod landing gear of the initial spacecraft design.[7]
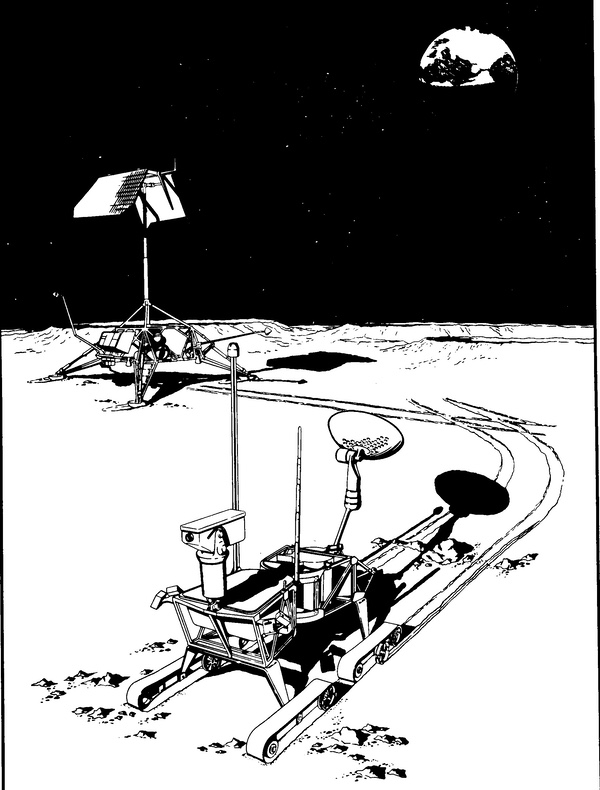
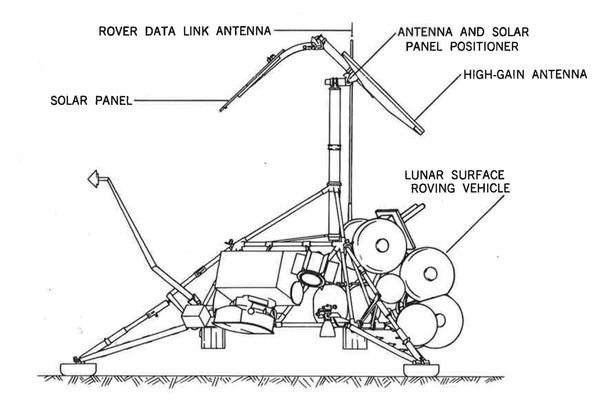 Surveyor missions after the first seven (later changed to after the first ten) were to be more capable and could even carry a Surveyor Lunar Roving Vehicle, or SLRV. These missions were still intended to support Apollo, possibly by scouting out specific landing sites. (credit: NASA) |
Hughes, which was then busy developing the Surveyor I for first launch in 1966, outlined a schedule for the Surveyor II missions that would have to precede the Apollo landings. The first Surveyor II launch would occur in the first quarter of 1968. It would be followed by nine launches on a bimonthly schedule ending in late 1969.[8] One possible mission that NASA human spaceflight officials were interested in involved landing a Surveyor with a beacon for an Apollo Lunar Module to home in on.[9]
| Upgrading Surveyor I into the Surveyor II configuration was considered by Hughes engineers to be relatively straightforward, depending upon how much capability NASA wanted to add. The development of a small lunar rover would have been more challenging. |
NASA’s policy for designating robotic spacecraft was to give the spacecraft missions letter designations until they were launched, at which time they were given numbers—Surveyor A became Surveyor 1, and so on. But the overall designation of the planned spacecraft, such as “Block II” and “Surveyor II,” shifted in documents at the time and was not clearly defined from the outset. The vehicles after the first seven were at one point referred to as the “Surveyor Follow-On” program, consisting of three to five spacecraft similar to the three operational Surveyors (Surveyors E-G). Other documents indicate that whereas missions eight to ten may have initially been considered part of a Surveyor II program, they were later considered to be upgraded Surveyor I missions, with Surveyor II comprising missions 11 to 17. As long as NASA was focused on the first seven missions, the later ten missions were ill-defined.
 The Jet Propulsion Laboratory, which managed the Surveyor program, issued contracts to two companies to build test versions of a Surveyor rover. The General Motors design seen here had three segments and six wheels and proved superior in tests. (credit: NASA) |
Rovers on the Moon
Upgrading Surveyor I into the Surveyor II configuration was considered by Hughes engineers to be relatively straightforward, depending upon how much capability NASA wanted to add. The development of a small lunar rover would have been more challenging. NASA’s Office of Space Science and Applications and the Office of Manned Space Flight were cooperating on the rover because it was being studied for verification of Apollo landing sites and could also have science applications.[10]
In early 1964, JPL requested that potential rover developers submit bids for study contracts and issued a short response time for the bids, apparently to weed out companies with limited capabilities and focus on those that had already performed significant internal studies of their own. Five companies submitted rover proposals: Space General, General Motors Defense Research Labs, Sperry Utah, Bendix Systems Division, and American Machine and Foundry. The rover would weigh approximately 45 kilograms (100 pounds) and be top-mounted on the Surveyor. It would contain its own imaging system for guidance and navigation. Primary communications would be directly to a ground antenna on Earth, which substantially limited its data rate.
JPL soon issued two contracts for a “Surveyor Lunar Roving Vehicle” or SLRV, to General Motors and Bendix Systems Division. General Motors produced its initial study report in April 1964.[11] GM’s proposed rover consisted of three box-like sections hinged together with six wheels. The rover would carry a television camera and a communications antenna that stuck up from its center box section and could be raised and lowered to deal with terrain blocking its signals. The General Motors rover was designed to be deployed from a modified Surveyor lander which would replace its instrument packages with a storage area and ramp to enable the rover to reach the lunar surface. The rover would be battery powered.
| GM had developed wire mesh wheels for the lunar surface. Using these wire wheels, the GM rover proved highly capable, able to handle rocks and inclines. The Bendix rover, however, was a disaster. |
In summer 1964, GM delivered a small prototype rover to JPL. It was radio controlled from a receiver unit that was equipped with a television screen. But the control system was designed with a time delay feature to simulate the several second round-trip transmission delay between an operator on Earth and the rover on the Moon. JPL engineers tested the small rover in an outdoor test area at the laboratory, driving it over various types of terrain. At the time, no craft had landed on the lunar surface, and operators did not know if they would be driving over rocks or the equivalent of sand or dust, so they tested all of these options. Although they found the time delay driving to be annoying—one operator reported it as “headache-inducing”—it was still feasible. According to Donald A. Beattie, author of Taking Science to the Moon, the GM rover also had a handheld controller that JPL technicians used for driving it around the test course.[12]
 Bendix proposed a rover with a single box-like structure and four tracked propulsion modules. In tests, the Bendix tracks performed badly. (credit: NASA) |
Bendix Systems Division also produced its rover report in April 1964.[13] The Bendix proposal was less conventional than General Motors’ lunar rover. The Bendix rover had four traction drive units operating elongated tracks on the end of four legs. The body structure mounted a television camera, electronic compartment, omni and radio-frequency ranging antennas, and a directional antenna for direct communication with Earth rather than through the lander. Instead of batteries, the rover had an RTG power supply mounted at the rear. The Bendix vehicle would have been much more complex and expensive than GM’s proposal, if only because of the RTG power source. But it was soon done in by its own design.[14]
According to Earl Swift, writing in Across the Airless Wilds, his 2021 history of the Apollo 15 lunar rover (see “Review: Across the Airless Wilds”, The Space Review, July 12, 2021), the GM and Bendix vehicles were tested by JPL in the Arizona desert in 1964. GM had developed wire mesh wheels for the lunar surface. Using these wire wheels, the GM rover proved highly capable, able to handle rocks and inclines. The Bendix rover, however, was a disaster. The treads started to shred as soon as the terrain got rough. JPL’s engineers halted the test; the GM design was the clear winner.[15]
In July 1964, Hughes Aircraft Company’s Space Systems Division produced a report on how the Surveyor lander could be modified to support either of the two rovers. This included equipping it with longer landing legs because the rover would be carried high on the vehicle and make it top heavy on landing. Hughes concluded that it was feasible to carry a small rover on the Surveyor.[16]
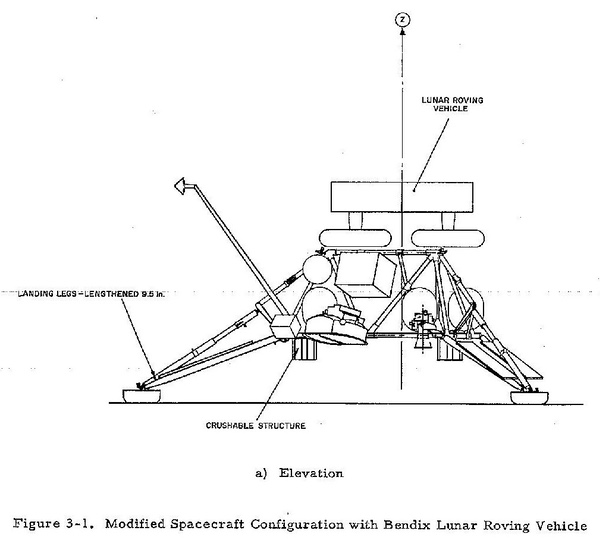 Hughes, which built the Surveyor landers and studied more advanced versions, evaluated how the General Motors and Bendix rovers could be carried on the lander. (credit: NASA) |
Surveyor Block II
While JPL was testing the two rover designs, Hughes was continuing to study more advanced versions of the Surveyor while proceeding with full-scale development of Surveyor A planned for a 1966 lunar landing. These advanced versions had the general designation of Surveyor Block II, and throughout 1964, the objective of Surveyor Block II was “to obtain critically needed lunar surface data required to select and certify the suitability of one or more Apollo landing sites.”[17] Certifying a landing site was a greater challenge than the requirements for the early Surveyors.
In November 1964, Hughes produced an extensive study of a “Surveyor II concept.”[18] Hughes evaluated different configurations for the Surveyor, including increasing its payload and the fuel required to land it. Alternative science payloads included a drill for sampling beneath the surface. The most radical approach would have replaced Surveyor’s solar panels with a Radioisotope Thermoelectric Generator (RTG), which would have enabled the spacecraft to last through the 14-day lunar night, with an ultimate lifetime of up to one year on the Moon. The spacecraft possibly could carry seismic sensors similar to those emplaced on the Moon by the Apollo astronauts, expanding the range of the seismic network that was already planned for Apollo. Although the study did not delve into the subject in detail, one option was equipping Surveyor to conduct a lunar sample return mission.
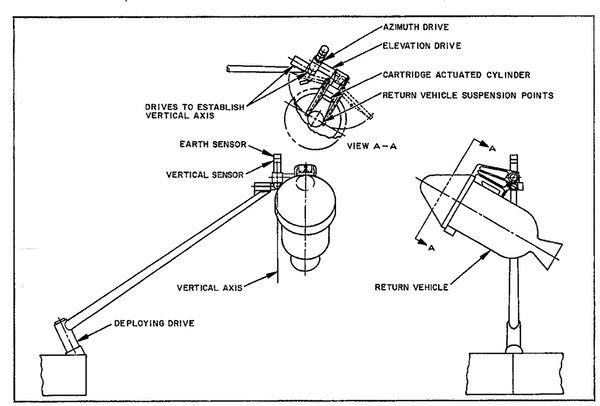
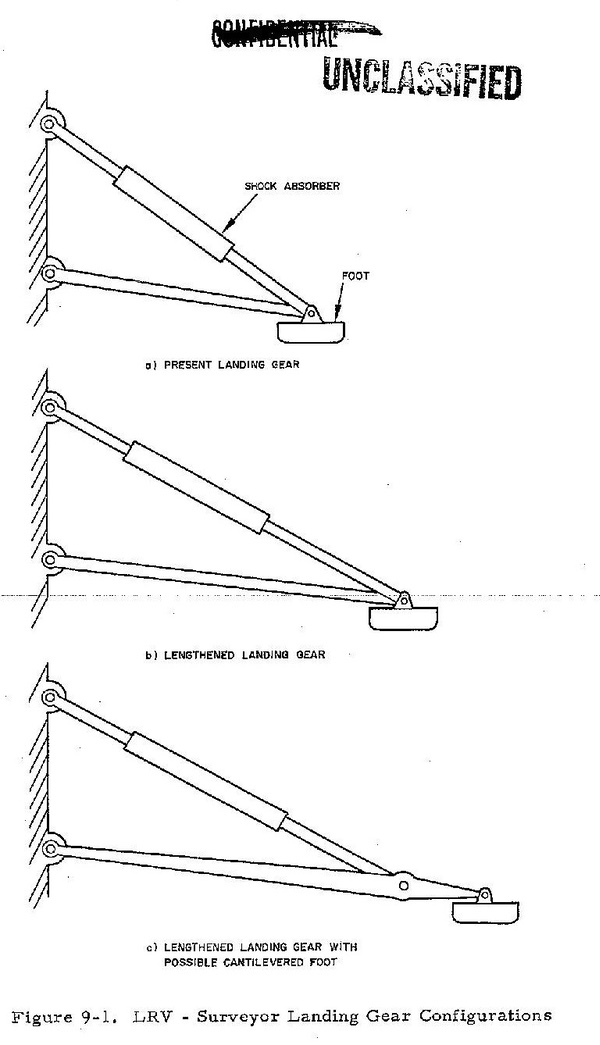 Hughes determined that upgraded versions of Surveyor would require longer landing legs and evaluated different methods of extending them. (credit: NASA) |
The Surveyor II lander would photograph the landing location and test the local surface composition. The study proposed several other uses for further Surveyor missions. These included providing logistics support at Apollo landing sites such as added communications, and delivering a rover to examine the local terrain prior to a human landing. Hughes reported that Surveyor II would not be able to land from 20 to 60 degrees east, an area then being considered for Apollo landings. Because of this, “ground truth” data would have to be extrapolated to this region by Lunar Orbiter or Apollo photography. The Block II spacecraft weight was to be 1,135 kilograms (2,500 pounds) with a possible increase to 1,225 kilograms (2,700 pounds).
Making precursor landings before an Apollo mission was based upon the assumption that the terrain at the Apollo landing sites might be considered so risky that manned landings required a robotic landing first. But the Apollo program was already pursuing numerous risk reduction efforts, including the Lunar Orbiter program to photograph potential landing sites and the highly classified UPWARD/Lunar Mapping and Survey System (LMSS) project, which would have adapted a top secret reconnaissance camera for use around the Moon.[19]
| In June 1965, Phillips wrote to E.M. Cortright explaining that although it would be desirable to have a Surveyor rover land at an Apollo site prior to a Lunar Module setting down there, this was not a requirement. |
Although the primary goal of Surveyor II was to explore and certify Apollo landing sites prior to a landing, Hughes identified other missions that a more advanced Surveyor could conduct. These missions included support to Apollo astronauts while they were on the surface, and exploration and science missions. The Surveyor “exploration mission” could put additional landers down in more locations on the Moon than the Apollo sites, expanding scientific knowledge of the Moon. The Surveyor “science mission” would have involved a more ambitious set of instruments and a longer-lived lander with an RTG that would keep the spacecraft alive during the two-week-long lunar night. It undoubtedly would have been significantly more expensive.
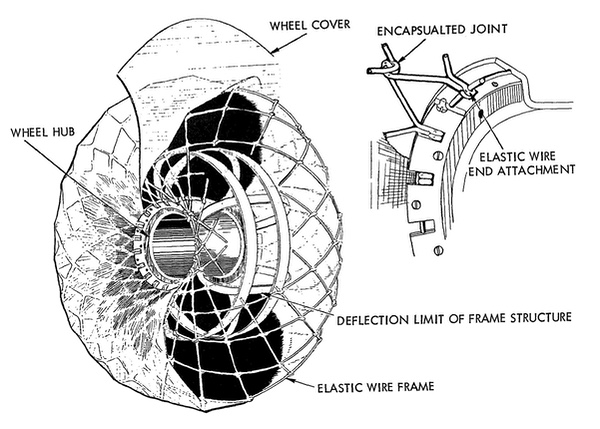 Although the Surveyor rover program was canceled in summer 1965 due to costs and the determination of NASA officials that it was not needed for Apollo landing site certification, it still had a legacy. The wire wheels developed for GM's rover were later adapted and modified for the Apollo Lunar Roving Vehicle, first carried on Apollo 15. (credit: NASA) |
Canceling the rover
In January 1965, NASA officials grew concerned about the high costs of the rover and started to back off on the view that it was required for Apollo, which had been its primary justification.[20] JPL would continue studies of a rover program, with rover missions possibly phased in by early 1969, although 1968 was desirable if practical. JPL was supposed to draft a plan for selecting one of the two rover contractors.
Oran Nicks, Director of Lunar & Planetary Programs in the Office of Space Science and Applications, admitted that satisfying the Office of Manned Space Flight rover requirements “resulted in an unrealistic view of the best utilization of Surveyor developments. The roving vehicle studies based on these requirements were necessary, however,” Nicks wrote, “in order to determine the magnitude of the problem of satisfying the stated Apollo requirements.”[21] Although he did not say so directly, Nicks implied that if lunar science had driven the Surveyor II requirements, the program studies would have looked a lot different.
In January 1965, NASA also decided not to start development of a Block II Surveyor with significantly increased capabilities, but to continue the Block I design with improvements for the near term, presumably meaning that NASA would not pursue a Block II design starting with the eighth spacecraft but instead a later mission.[22] These follow-on Surveyor spacecraft were still intended to directly support Apollo landings and would have touched down on the lunar surface with dynamics instrumentation, an Apollo landing location device, and a means for enhancing the visibility of the landing Surveyor.[23]
 Hughes studied different missions for Surveyor beyond supporting Apollo. One option was for a lunar surface sample return mission. It does not appear that this was extensively studied. (credit: NASA) |
Although NASA officials had determined that the rover would not be valuable for Apollo, there were still some in NASA who believed it could provide useful data for developing a future manned lunar rover, something that could have been included in later Apollo missions. In June 1965, Franklin P. Dixon, the Acting Director of Advanced Manned Mission Studies, wrote to the director of the Advanced Manned Missions Program. Dixon explained that the Surveyor rover could be used to test the environment and terrain for a future manned rover. But he admitted that the rover instrumentation would be extremely limited, meaning that much of the information would not be obtained by direct measurement but would have to be inferred from telemetered data.[24]
Dixon added that there were many questions about the capability of operators to remotely steer and control the vehicle under extreme lighting conditions and information time delay. There were also questions about the ability of the video and guidance instrumentation to provide necessary data, and ability of the operator to analyze data provided and then react to variations in surface conditions. There were also questions about verification of vehicle components and the technology. Dixon stated that if the instrumentation on the rover could be improved, it would be more valuable to future manned rover projects.
By this time the Surveyor rover’s costs and its limited utility had already attracted attention outside of NASA. In May 1965, House and Senate report language instructed NASA not to begin rover development but to continue studying it, and to continue studying the requirements for the rover. NASA’s plan had been to have a rover ready by mid-1968 for the purpose of certifying landing sites, and unless development was started quickly, it would not be available for direct support of Apollo. If it slipped into 1969, its need would be questionable.[25]
Shortly after, Director of Lunar & Planetary Programs Oran Nicks responded to Surveyor program manager Benjamin Milwitzsky that the congressional language implied that the rover should not be developed until after a successful Surveyor mission had occurred. Nicks stated that they should at least begin planning for development of the advanced lander that could carry such a rover based on Nicks’ belief that this was within the scope of the intent of the congressional language. He noted that they had to proceed with development of the advanced lander at that time if they wanted to eventually have a choice to fly the rover.[26]
In June 1965, Major General Samuel G. Phillips, Director of the Apollo Program, wrote to E.M. Cortright explaining that although it would be desirable to have a Surveyor rover land at an Apollo site prior to a Lunar Module setting down there, this was not a requirement. “It is not, however, clear that the lunar surface will be stressed by the roving vehicle to levels comparable with those generated during the landing of the Lunar Excursion Module,” Phillips wrote. Data of that kind was also not necessarily required.[27]
| Gray wrote that the Surveyor rover was not required for certification of landing sites. He also stated that it was not required to aid in the development of a manned rover. The Surveyor rover’s two primary justifications had therefore ended. The rover was then canceled. |
Phillips stated that with limited human and other resources, he believed that the basic needs of Apollo would be best served by assigning higher priority to the other Surveyor aspects. Phillips added that he was only indicating an opinion about the Surveyor rover’s usefulness to Apollo, not other NASA missions. He acknowledged that the rover could also be used for science purposes by the Office of Space Science and Applications, and as a mobility prototype by the Advanced Manned Missions Program Directorate.
Gray, the director of the Advanced Manned Missions Program, wrote to the Associate Administrator for Manned Space Flight in July 1965 to declare that the Surveyor rover was not required for certification of landing sites. He also stated that it was not required to aid in the development of a manned rover. The Surveyor rover’s two primary justifications had therefore ended.[28] The rover was then canceled.
Also in July, NASA recommended that Surveyor missions K-Q “be implemented with spacecraft-mounted scientific experiments”—meaning no more planning to carry a rover and a shift toward science goals for the later Surveyor missions.[29] Associate Administrator for Space Science and Applications Homer Newell wrote that “the use of fixed instrumentation on stationary Surveyor spacecraft for missions K thru Q will permit the highest probability of successfully accomplishing a large number of investigations at different points on the Moon which will be of benefit to Apollo and also provide a deeper scientific understanding of the nature of the Moon.”
Newell also cautioned that Surveyor was then in a “critical phase” and nothing should be allowed to affect the spacecraft development. Because of the significant corporate expenditure by rover contractors Bendix and General Motors, Newell recommended that NASA Administrator James Webb be involved in directly speaking to senior management at the companies about the rover cancellation. Finally, Newell reiterated that “missions K thru Q with spacecraft-mounted scientific experiments be approved as an integral part of the Surveyor program.”
page 2: advanced Surveyor missions >>
Note: we are using a new commenting system, which may require you to create a new account.