Dark side of the Moon: the lost Surveyor missionsby Dwayne Day
|

| Surveyor had now been cut back from 17 missions to 10, and a future rover mission was no longer possible unless NASA made a major reversal in plans. |
But NASA soon scaled back plans even further. In May 1965, NASA ordered that the eighth through tenth missions (H-J) carry the same instruments as their three predecessors. “This decision will eliminate perturbations of the on-going engineering effort at the Hughes Aircraft Company, provide a higher density for the first group of operational missions, improve the probability of mission success and the early acquisition of data from a number of locations on the lunar surface, and reduce critical project funding problems,” a memo explained. NASA’s plan was still to proceed immediately with implementing seven follow-on missions after those ten.[30]
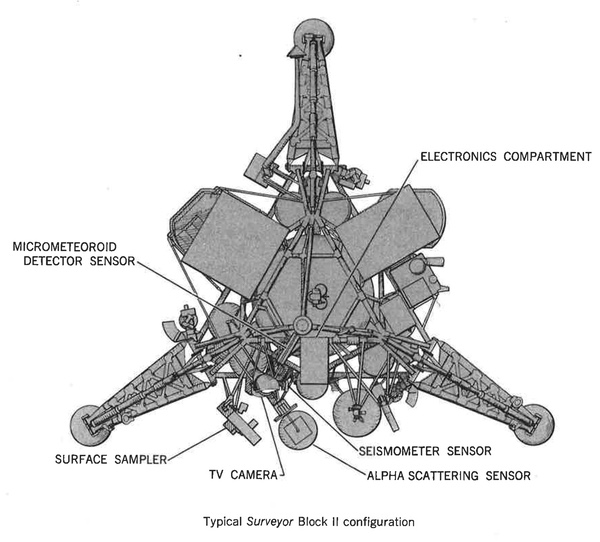 By October 1965, Surveyor had been cut back from 17 missions to 10. By December 1966, the program was cut back to only seven missions due to budgetary limitations. Because Apollo would not visit key sites on the Moon such as the lunar poles or far side, scientists hoped to revive Surveyor to continue science missions. In spring 1967 NASA produced a report that outlined an ambitious program involving up to eleven additional Surveyor missions, including Block II and Block III designs. Block II, shown here, would have involved only modest upgrades to the basic spacecraft used for the first seven Surveyor missions. (credit: NASA) |
In July 1965, NASA planned to have missions K-Q carry science payloads that would be solicited via an announcement to the scientific community.[31] But in October 1965, NASA canceled Surveyor missions K-Q “as a result of recent budget review.”[32] Surveyor had now been cut back from 17 missions to 10, and a future rover mission was no longer possible unless NASA made a major reversal in plans. The decision freed up $1.5 million that could be reprogrammed to missions A-G.[33]
Throughout 1966, NASA was still planning for ten Surveyor missions. Surveyor 1 successfully landed on Oceanus Procellarum on June 2, 1966. By December 1966, NASA canceled Surveyor missions H-J.[34] From 17 to only 7 missions, NASA officials had dramatically scaled back Surveyor’s scope.
The work on the Surveyor Lunar Roving Vehicle did have some benefits. Some of the technology and personnel who had worked on that program moved to studies of human lunar rovers such as the MOLAB concept. Bendix, which had produced the unsuccessful Surveyor rover, became a contractor on MOLAB. The wire mesh wheels that GM had developed for their rover were also adapted for Boeing’s MOLAB work, and in a more refined version formed the basis for the wheels eventually used on the Apollo Lunar Roving Vehicle. Benjamin Milwitsky, who ran the Surveyor program, moved to MOLAB.[35]
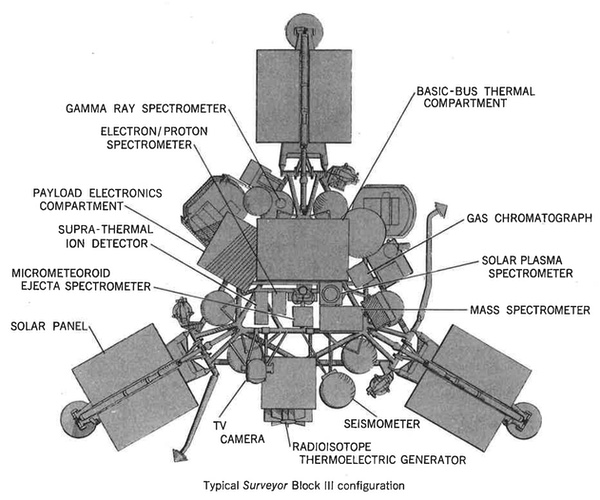 The Block III Surveyor spacecraft proposed in spring 1967 would have been substantially upgraded compared to the flown Surveyor missions. It was the equivalent of the "Surveyor II" design first proposed in 1964. It could have included a radioisotope thermoelectric generator (RTG) for a lifetime on the lunar surface up to one year. A different version could have carried a small rover. (credit: NASA) |
Science Surveyor
In 1965, at the same time that NASA was dramatically scaling back Surveyor, the National Academy of Sciences Space Science Board was holding a “summer study” at Woods Hole, Massachusetts, and produced the report Space Research–Directions for the Future.[36] Among other things, the report outlined 15 science questions for the Moon divided into three overlapping categories: structures and processes of the lunar interior; composition, structure, and processes of the lunar surface; and the history of the Moon.
That Space Science Board report, published in early 1966, apparently inspired some within the lunar science community to hope that Surveyor could be expanded to answer lunar science questions even after Apollo ended. In March 1967, NASA produced a report that identified “future Surveyor mission possibilities.”[37] The NASA report sought to outline a future lunar scientific exploration program using Surveyor, and explained that because Apollo was restricted to equatorial sites it would not answer the fundamental questions about the Moon. Stamped on the cover were the words “NOT AN APPROVED PROGRAM.”
| The Surveyor program’s history echoes other NASA projects of the time: many proposed missions, poorly-defined goals, murky connections to actual requirements, followed by substantial scaling back and re-focusing as Apollo goals and engineering requirements became clearer. |
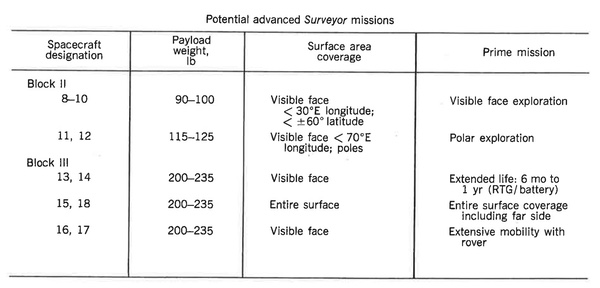
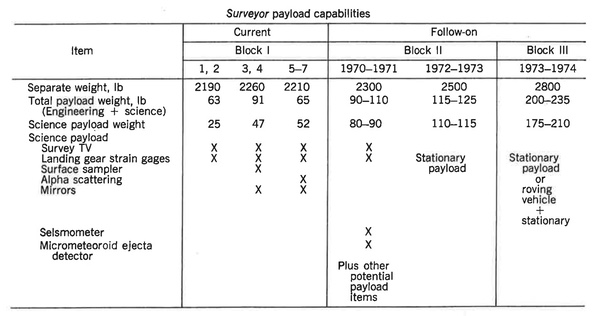
Although Surveyor was now scheduled to end at only seven missions, the report suggested that NASA could build more spacecraft and steadily upgrade them, providing options for both Block II and Block III Surveyor spacecraft. The overall proposal was for 11 more spacecraft beyond the seven planned, with launches stretching out to 1974. This was one more lander than envisioned two years earlier, and some later missions would have required a relay orbiter. The science plan was for five Block II spacecraft—essentially upgraded Block I versions—of which at least two would land in polar regions. These would be followed by six Block III spacecraft which would have extended lifetimes, carry a rover, and could eventually land on the lunar farside. The report mapped out the 15 Space Science Board questions about the Moon to capabilities added to these 11 missions.
 In spring 1967 NASA produced a report proposing additional Surveyor missions, including Block II and Block III designs. These would have included landings beyond the equatorial region where the Apollo missions were planned to land, and could have had extended lifetimes on the lunar surface. (credit: NASA) |
The report stated that an advanced Surveyor could land in polar regions and hazardous areas such as the lunar highlands, not reachable by Apollo. The Block II could carry 55 kilograms (125 pounds) of payload, up from the 27–41 kilograms (60–90 pounds) of the Block I. The Block III could increase payload mass to 110 kilograms (245 pounds), big enough to undertake stationary missions with extended lifetimes and to carry a rover for mobile studies of selected lunar surface areas.
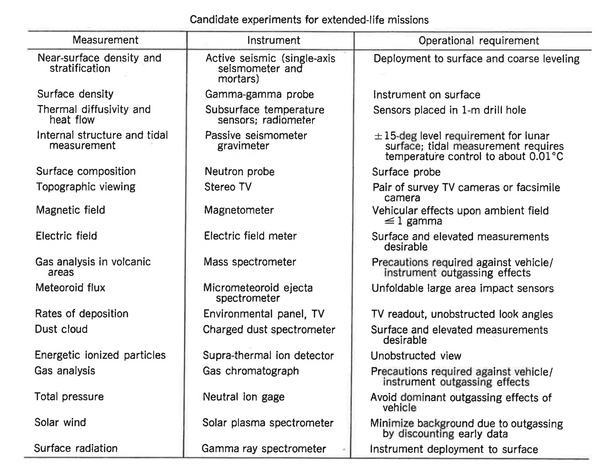
Block III would enable scientists to study a wider range of lunar phenomena such as internal fields and external particle environments, fine structure of the Moon and geomorphology, mineralogy and petrology, physical properties, and gravitational and geodetic parameters. Block III spacecraft could also be used to establish a network of lunar surface science stations, support Lunar Orbiter data interpretation (so-called “ground truth”), and could even perform a lunar farside mission with the addition of a communications relay orbiter (a mission that was not achieved until China accomplished it in 2020). A Surveyor rover could deploy explosive charges to investigate local subsurface structural characteristics. The lander’s extended lifetime could be valuable in studying lunar thermal history.
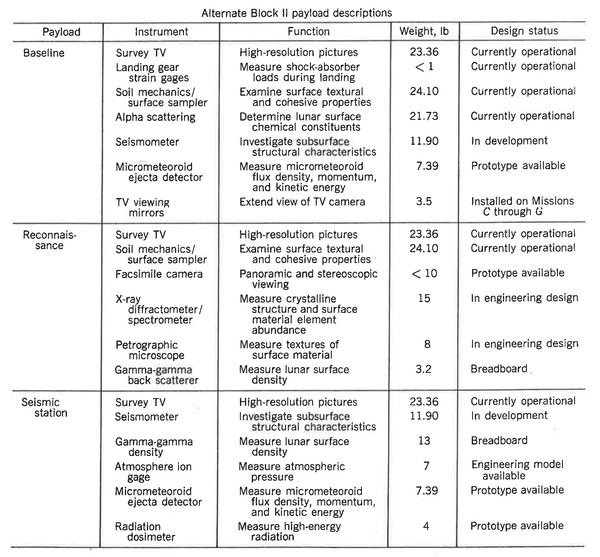
The Block II spacecraft was proposed in three configurations: baseline, reconnaissance, and seismic station. The baseline would carry the same instruments as the existing Block I but add a seismometer and a micrometeoroid ejecta detector. The reconnaissance configuration would add new instruments, and the seismic station would add a seismometer as well as other instruments, such as a radiation dosimeter.
| Continuing lunar science missions would have been a hard sell as NASA budgets were falling. But scientists still envisioned possible missions. |
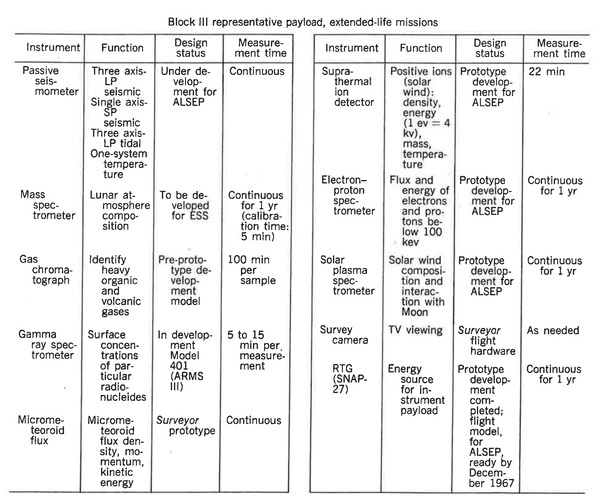
The Block III design was essentially the late 1964 Surveyor II proposal for a substantially upgraded spacecraft. It could carry additional instruments and would be the version required to carry a rover. It could also be a long-life vehicle with the addition of an RTG. Block III spacecraft could explore the near side of the Moon with missions lasting from 6 to 12 months or conduct lunar farside missions. “A typical Block III payload includes a variety of combinations of seismomenters, spectrometers, gamma ray, ion and micrometeoroid detectors, and advanced survey and stereoscopic cameras,” the report stated. One possible mission could be the investigation of “lunar clouds” that had been observed at Alphonsus crater and possibly also Aristarchus, and were suspected of being caused by volcanic activity.
In spring 1967 NASA produced a report proposing additional Surveyor missions, including Block II and Block III designs. These would have included landings beyond the equatorial region where the Apollo missions were planned to land, and could have had extended lifetimes on the lunar surface. (credit: NASA) |
The small rover could carry equipment for remote placement, such as seismometers, magnetometers, and beacons. It could transport an X-ray spectrometer and diffractometers for soil analysis. It could even emplace detonating charges to create seismic disturbances to analyze the lunar subsurface. The report did not indicate if these were merely possible missions or if some study had been performed evaluating the mass and other requirements for putting such instruments on the rover. A battery-powered rover would have faced significant challenges performing very long on the Moon. The report included over half a dozen tables that explained the instrument options for the Block II, III, and rover spacecraft. It represented the dream ambitions of the lunar science community as of 1967 and would have been an expensive program to undertake—the 11 missions would have cost more than the 10 missions that NASA had previously canceled to save money. But as the cover stamp indicated, it was “not an approved program.”
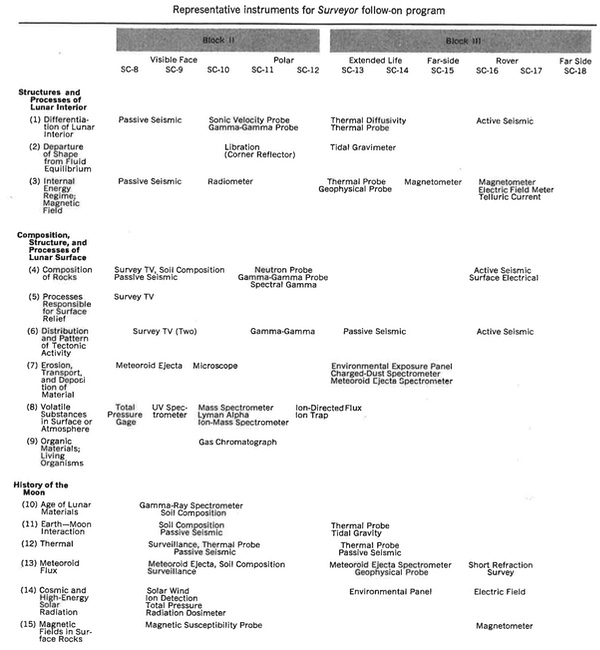 In 1965, the Space Science Board produced a report that outlined fifteen science questions for the Moon divided into three overlapping categories: structures and processes of the lunar interior; composition, structure, and processes of the lunar surface; and the history of the Moon. In spring 1967, NASA scientists outlined how an advanced Surveyor program could help answer these questions. (credit: NASA) |
Dashed ambitions
The Surveyor program’s history echoes other NASA projects of the time: many proposed missions, poorly-defined goals, murky connections to actual requirements, followed by substantial scaling back and re-focusing as Apollo goals and engineering requirements became clearer. The Apollo Applications Program (AAP), for instance, at one time was planned to include dozens of launches to undertake dubious missions like weather observations and Earth science (already performed by robotic spacecraft) and ambiguous scientific research. AAP was eventually scaled back to a single Skylab mission. The Surveyor program’s requirements were established by the needs of the Apollo program not science, and once it was clear that the Apollo Lunar Module could land safely at a variety of sites without the need for a robot to survey the terrain or provide a landing beacon, Surveyor was scaled back significantly.
The 1967 Surveyor report was far more focused than earlier Surveyor reports: what Surveyor could do to answer high-priority lunar science questions that would likely not be answered by Apollo. It is unknown if Surveyor could have contributed to those questions in meaningful ways, but the report established clearer objectives for robotic landing missions than before, as well as a more logical designation system.
 The Block II and Block III Surveyor spacecraft proposed in a spring 1967 NASA report could have increased the capabilities provided by the early Surveyor missions. By the time of this report, Surveyor 1 had successfully landed on the Moon and Surveyor 2 had crashed. Surveyor 3 would successfully land soon after the report was produced, but the program had already been limited to only seven missions. (credit: NASA) |
Continuing lunar science missions would have been a hard sell as NASA budgets were falling. But scientists still envisioned possible missions. In summer 1967, a scientific study on advancing lunar science recommended increasing Apollo lunar stay times and creating a geophysical network on the Moon, possibly using Surveyor landers.[38] That study had no impact on Surveyor planning.
 The March 1967 NASA report for an advanced Surveyor program outlined how different payloads could be adapted to an upgraded Surveyor design in order to address high priority science questions. (credit: NASA) |
In August 1968, as planning for the first Apollo landing became focused on the specific capabilities of life support and other systems, Apollo managers sought to eliminate virtually all science from the first mission. One scientist warned that if the science cutbacks continued, Apollo critics could legitimately claim that Surveyor Block III could perform better science than Apollo.[39] But this argument was like whistling past the graveyard. Surveyor was not going to be revived.
 By extending the lifetime of a Surveyor lander on the lunar surface to up to one year, NASA scientists hoped to answer various questions about the origins and composition of the Moon. (credit: NASA) |
Surveyor 7 Goes to Tycho
After Surveyor 1’s successful landing in June 1966, Surveyor 2 crashed near Copernicus crater in September. Surveyor 3 landed successfully in April 1967, this time equipped with a surface sampler—a shovel—that dug shallowly into the lunar dust. It was also equipped with higher visibility devices to make it easier to see. The mission was followed three months later by Surveyor 4, which crashed in July. But Surveyors 5 and 6 successfully landed in September and November of the same year.
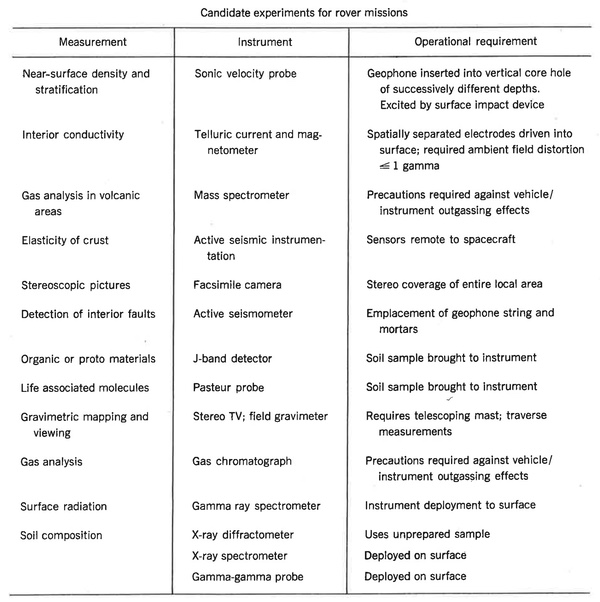 The spring 1967 proposal for an advanced Surveyor program also proposed new missions for the small rover. The General Motors rover evaluated in 1964 was capable of navigating rough terrain, but it had a minimal payload capability. It is unclear if any further studies indicated that it could conduct these missions. (credit: NASA) |
The four successes provided NASA with sufficient data for Apollo, and Surveyor 7 was the only mission whose landing site was selected primarily for scientific purposes, setting down in January 1968 near Tycho crater. At the time, Tycho was not a planned Apollo landing site. Although mission scientists evaluated Tycho as a potential future landing site, Apollo program managers rejected it. If a monolith was buried under the crater, Apollo astronauts would not stumble over it.
 The Block III design was intended to be the ultimate Surveyor, possibly even conducting missions to the lunar far side with the addition of a communications relay orbiter. Many science instruments proposed for the Block III would have required an extended lifetime. (credit: NASA) |
In November 1969, Apollo 12 astronauts Pete Conrad and Alan Bean landed near Surveyor 3 on Oceanus Procellarum without the aid of a landing beacon on the long-dead spacecraft. They removed pieces of the spacecraft for return to Earth for further study. Surveyor’s scientific value continued even after the program was over.
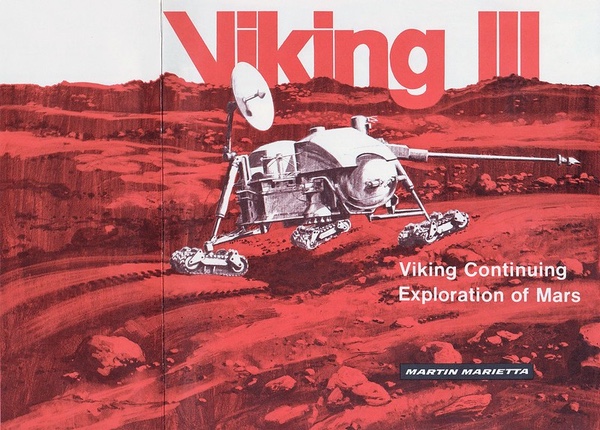 By the mid-1970s, JPL was considering rovers for Mars. This proposed Viking III rover would have used a “traction drive” system for moving on the Martian surface. That system had been tested by JPL a decade earlier and had performed badly. (credit: NASA) |
Blue rover on the Red Planet
The advanced Surveyor contracts and studies did have one legacy, however. JPL had been interested in Mars rovers while the Viking program was underway in the 1970s. But their rover designs were all very large, ambitious, and complicated. One study involved a Viking spacecraft with legs with tracks at their bottoms, similar to the Bendix lunar rover study. It was an ungainly design. Other 1970s Mars rover concepts had four wheels connected to a box structure. One of the conundrums facing engineers at the time was that small rovers would not be able to climb over obstructions, and big rovers that could handle rough terrain were too big for available launch vehicles.
 In the 1980s, the General Motors Surveyor rover was modified for tests. It was painted blue and generally referred to as the Blue Rover. The camera system that had been mounted on its center module was removed and a stereoscopic camera system was mounted on one end. (credit: NASA) |
By the 1980s JPL engineers began thinking smaller and thinking different. They started with a small rover on Mars that would primarily communicate through its lander. The small General Motors lunar rover constructed and tested at JPL in the 1960s had been in storage for decades. It was pulled out of storage, modified, and updated in the 1980s. Engineers put a stereo viewing system on it on the forward compartment, and removed the original camera and the deployable radio antenna from the middle box. They painted it blue and called it the “Blue Rover.” That rover was used to test concepts for a small Mars rover. The six wheels handled terrain much more effectively than four. One downside was that the GM rover’s three boxes had to be connected to each other, and more connections meant more possible failure points. One of the designers of the wire wheels for the GM rover and later Apollo 15 lunar rover took that basic six-wheel design and modified it. Instead of attaching the wheels to three separate box structures, he attached them to an inverted V-shaped suspension system called a rocker-bogie that could be mounted to a single box structure. This kept the six-wheeled capability of the original Surveyor rover but eliminated the drawbacks of the multi-segmented structure.[40] Eventually, the lessons learned from the Blue Rover led to JPL’s Sojourner rover that flew to Mars as part of the Pathfinder program, landing on July 4, 1997. Sojourner provided valuable experience and data used to design the four highly successful NASA rovers that followed. The advanced Surveyor never got built, but its spirit made it to the Red Planet.
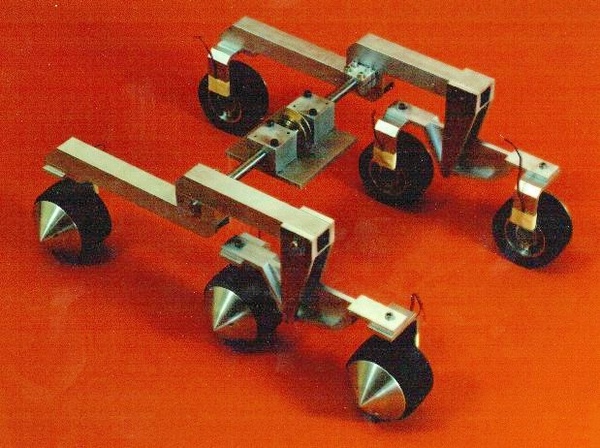 By the late 1980s and early 1990s, JPL began evaluating ways of achieving the superior mobility demonstrated by General Motors’ small rover in the 1960s, but adapting it to a single structure. The result was the "rocker bogie" approach seen here, which has now been used by all American Mars rovers. (credit: NASA) |
After Apollo, the American lunar science community was like a man who had gorged himself at Thanksgiving dinner and nearly passed out. The Ranger, Lunar Orbiter, and Surveyor programs of the early 1960s had primarily whetted the appetites of planetary scientists, but the main course had arrived with the Apollo landings late in the decade, and particularly by the J missions, beginning with Apollo 15: high-resolution photos of various parts of the Moon, lunar mapping camera images and laser altimetry of vast areas, physics and gravity data collected from lunar orbit, and a suite of emplaced sensors at the Apollo landing sites that would continue to operate for years. But, of course, it was the hundreds of kilograms of lunar samples that would be studied for decades that overwhelmed the scientists with data. Despite the enhanced science on the last three Apollo missions, they were still constrained to the equatorial region on the near side of the Moon, leaving many areas, such as the poles—where lunar volatiles would later be detected—completely unexplored.
Apollo’s success, and its costs, had consequences for lunar science. While the 1960s and early 1970s were a period of feast for lunar science, the famine that followed lasted a long time. The next American lunar mission, Clementine, did not fly until two decades later, in the 1990s, and then it was years later before Lunar Prospector, and then a decade until Lunar Reconnaissance Orbiter, which still operates today and has provided a wealth of data about the Moon. There was also a lunar impactor mission, and the GRAIL orbiter, to provide more data on the Moon. But no American landers.
 This mid-1980s artwork shows a theoretical Mars rover based upon the General Motors small rover design. Although the six-wheel design could handle rough terrain, JPL engineers were wary of having multiple segments, which required connections that could fail. (credit: NASA) |
The end of lunar science missions after Apollo was not what planetary scientists in the 1960s wanted or expected to happen. During the 1960s, before Apollo 11 had landed on the Moon, lunar scientists expected to continue lunar science into the foreseeable future and had a long list of science questions. Surveyor was one possible way to answer those questions. NASA’s planetary science program instead turned its focus to Mars. NASA has now landed more robotic missions on Mars than on the Moon.
| Apollo’s success, and its costs, had consequences for lunar science. While the 1960s and early 1970s were a period of feast for lunar science, the famine that followed lasted a long time. |
The Soviet Union landed two Lunokhod rovers on the Moon in the early 1970s. They were considerably larger than the small Surveyor rover concept. China has also sent three landers and two rovers to the Moon and brought samples back from the surface. NASA currently has plans to send the VIPER rover to the Moon in the next few years. Had Surveyor not been substantially scaled back in the mid-1960s, an American rover could have rolled around the lunar surface late in that decade. But it was not to be, and we will have to wait a bit longer to see an American robotic lander, or rover, on the Moon.
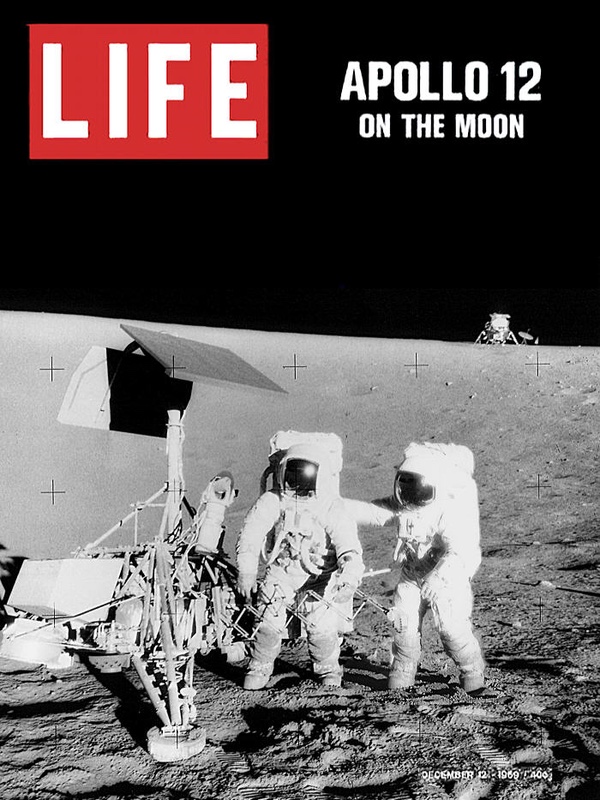 Author Andy Chaikin produced this cover of Life magazine featuring the Apollo 12 astronauts visiting Surveyor 3. The astronauts returned pieces of the spacecraft to Earth, but were never able to take a photograph of both of them with the lander.(credit: Andrew Chaikin) |
References
- Although NASA commissioned official histories of both the Ranger and Lunar Orbiter programs, the only official history of Surveyor is a short management history. Erasmus H. Kloman, Unmanned Space Project Management – Surveyor and Lunar Orbiter, NASA, SP-4901, 1972. 1The author has not found any published accounts that detail the varying plans for Surveyor as opposed to the flown missions. See also: J. Jason Wentworth, “A Survey of Surveyor,” Quest, Vol 2, No. 4, Winter 1993, pp. 4-16.
- David Portree, “The Moon and Beyond: A 1963 Plan to Expand NASA’s Robotic Exploration Programs.”
- Hughes Aircraft Company, Space Systems Division, “Proposed Project Development Plan: Surveyor II,” November 1964. p. 2-2.
- Ibid.
- Hughes Aircraft Company, Space Systems Division, “Proposed Project Development Plan: Surveyor II,” November 1964. p. 1-2.
- Ibid.
- Ibid.
- Hughes Aircraft Company, Space Systems Division, “Proposed Project Development Plan: Surveyor II,” November 1964. p. 1-4.
- M. Gray to Bill Taylor, August 3, 1964, HQ Surveyor Folder.
- E.P. Andrews to E.L. Grey, January 23, 1964, NASA Headquarters History Archive, Surveyor Folder (hereafter “HQ Surveyor Folder”).
- The GM report is not publicly available. The only publicly available report on the GM vehicle is from a year later and concerns the results of driving and vision tests. GM Defense Research Laboratories, “SLRV Control Study Final Report,” March 1965.
- Donald A. Beattie, Taking Science to the Moon: Lunar Experiments and the Apollo Program, The Johns Hopkins University Press, 2003, pp. 53. The GM rover was apparently used for driving tests at JPL for many years. See: “Vehicle Mobility Tests – Soft Soil Slopes,” JPL-760-51, June 25, 1970.
- Bendix Systems Division, Phase I Final Technical Report, BSR-903, Volume I Program Summary, April 1964.
- Spaceflight Blunders & Greatness, “Surveyor’s Cancelled Lunar Rover”, July 22, 2021.
- Earl Swift, Across the Airless Wilds – The Lunar Rover and the Triumph of the Final Moon Landings, HarperCollins Publishing, 2021, p. 294.
- Hughes Aircraft Company, Space Systems Division, “Surveyor Spacecraft – Lunar Roving Vehicle Integrated Subsystem Study,” July 27, 1964.
- Myron W. Krueger to Maj. Gen. Samuel Phillips, ”Report on Surveyor Block II Status Meeting,” October 8, 1964.
- Hughes Aircraft Company, Space Systems Division, “Proposed Project Development Plan: Surveyor II,” November 1964.
- Phil Horzempa, “Gambit to the Moon: Project Upward,” Quest, Vol. 27, No. 3, 2020, pp. 9-34.
- Oran W. Nicks, Director, Lunar & Planetary Programs, Office of Space Science and Applications, to General Alvin R. Luedecke, Deputy Director, Jet Propulsion Laboratory, January 7, 1965, HQ Surveyor Folder.
- Oran W. Nicks, Director, Lunar & Planetary Programs, Office of Space Science and Applications, to General Alvin R. Luedecke, Deputy Director, Jet Propulsion Laboratory, January 7, 1965, HQ Surveyor Folder.
- Oran W. Nicks, Director, Lunar & Planetary Programs, Office of Space Science and Applications, to General Alvin B. Luedecke, Deputy Director, Jet Propulsion Laboratory, January 2, 1965, HQ Surveyor Folder.
- Homer E. Newell signed for Benjamin Milwitsky, Surveyor Program Manager, Lunar & Planetary Programs, Office of Space Science and Applications, to Dr. William H. Pickering, Director, Jet Propulsion Laboratory, March 15, 1965, HQ Surveyor Folder.
- Franklin P. Dixon, the Acting Director of Advanced Manned Mission Studies, wrote to the director of the Advanced Manned Mission Studies, “Possible Benefits of the Surveyor Roving Vehicle Program to Manned Lunar Mobility Evolution,” June 18, 1965, HQ Surveyor Folder.
- Benjamin Milwitzky, Surveyor Program Manager, to Director, Lunar & Planetary Programs, “Congressional Actions Regarding Surveyor Roving Vehicle,” May 24, 1965, HQ Surveyor Folder.
- Oran W. Nicks, to Benjamin Milwitsky, “Surveyor Roving Vehicle,” May 28. 1965, HQ Surveyor Folder.
- Major General Samuel G. Phillips, Director of the Apollo Program, to E.M. Cortright, June 23, 1965, HQ Surveyor Folder.
- Edward E. Gray, to the Associate Administrator for Manned Space Flight, “Utility of the Surveyor Lunar Roving Vehicle to the AMS Program,” July 1, 1965, HQ Surveyor Folder.
- Robert F. Garbarone signing for Homer K. Newell, Associate Administrator for Space Science and Applications, to Associate Administrator, “OSSA Recommendations Regarding Surveyor Roving Vehicles,” July 6, 1965, HQ Surveyor Folder.
- Homer E. Newell, Associate Administrator for Space Science and Applications, to Director, Lunar and Planetary Programs, May 19, 1965, HQ Surveyor Folder.
- Homer Newell, Associate Administrator for Space Science and Applications, NASA, to Donald F. Scott, California Institute of Technology, June 11, 1965, HQ Surveyor Folder.
- Robert F. Garbarint, Director Launch Vehicle and Propulsion Programs, to Director of Engineering, Office of Space Science and Applications, “Surveyor Missions K-Q,” October 25, 1965, HQ Surveyor Folder.
- Chief, NASA/JPL Contract Administration Group, to NASA Headquarters,” November 5, 1965, HQ Surveyor Folder.
- “3 Surveyors Eliminated From Program,” NASA News Release No. 66-318, December 13, 1966, HQ Surveyor Folder.
- Beattie, Taking Science to the Moon, p. 54, 152; Swift, Across the Airless Wilds, pp. 96-99.
- Space Science Board, Space Research – Directions for the Future, National Academy of Sciences, National Research Council, 1966. pp. 21-22.
- NASA, “Summary of the Surveyor Program,” March 1967, HQ Surveyor Folder. This report is partially reproduced in: Robert Godwin, Surveyor Lunar Exploration Program – The Mission Reports, Apogee, 2012.
- William David Compton, Where No Man Has Gone Before – A History of NASA’s Apollo Lunar Expeditions, Dover Publications, Inc., 2010, p. 99. (Originally published in 1987.)
- Ibid., p. 117.
- Swift, Across the Airless Wilds, pp. 86; 92-95.